mirror of
https://github.com/CopterExpress/clover.git
synced 2026-05-30 22:59:31 +00:00
46 lines
1.7 KiB
Markdown
46 lines
1.7 KiB
Markdown
# "QCS" - the network of Clover charging stations
|
|
|
|
[CopterHack-2023](copterhack2023.md), team **Lyceum 128**.
|
|
|
|
## Network realisation
|
|
|
|
Our charging stations use Python web server created with Django framework. On that server we storage information about charging stations:
|
|
|
|
- Position (GPS + ArUco marker).
|
|
- Possibility to drone landing.
|
|
- Drone info (If it's on it).
|
|
|
|
To connect to server we use API with special personal key for every drone and station. It can be regenerated if secured key became public.
|
|
|
|
If you want to test station without drone you can use API Debug page. You must be in your account to open it.
|
|
|
|
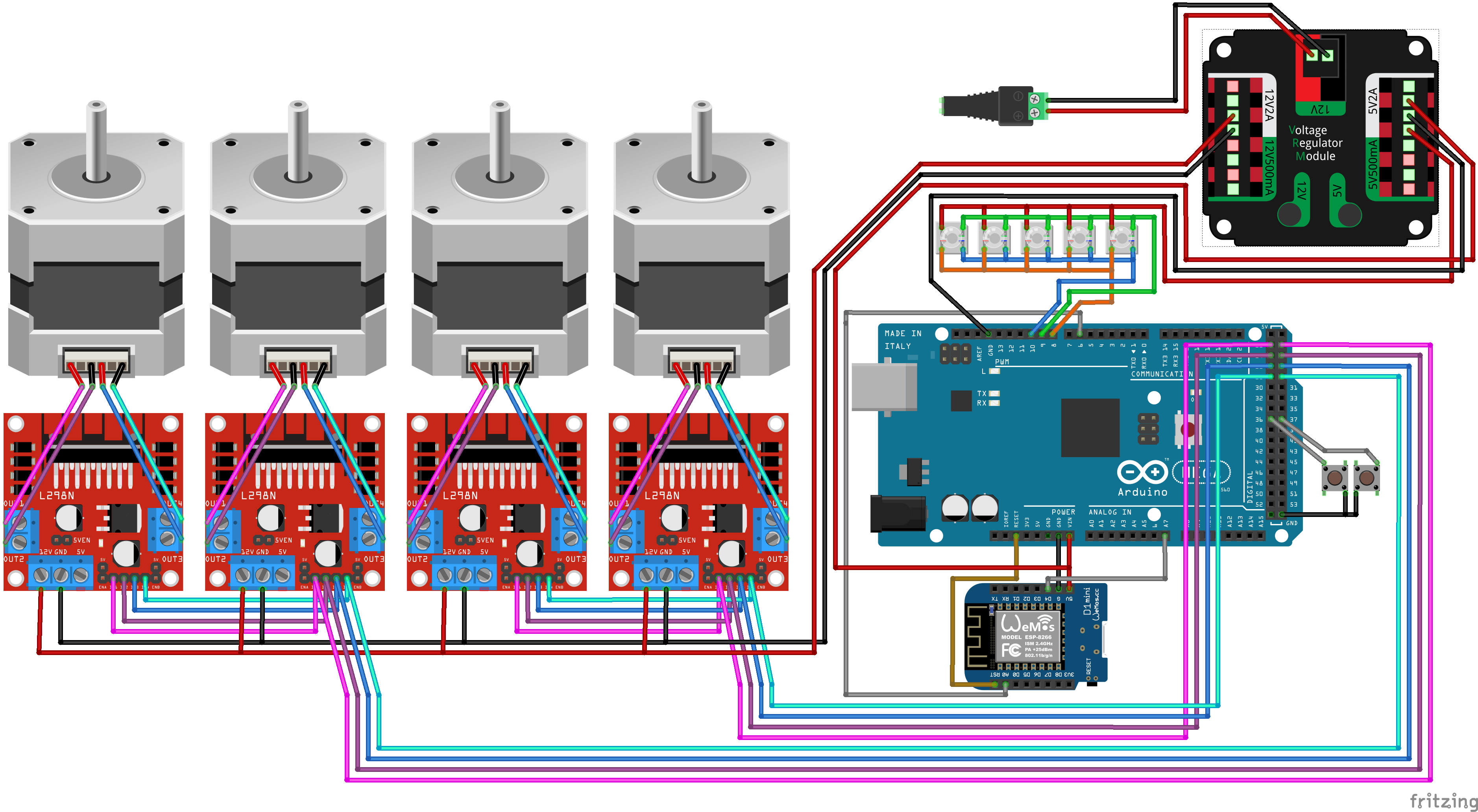
### Electronics in the station
|
|
|
|
There are Arduino Mega and Wemos D1 on the station.
|
|
|
|
|
|
|
|
Wemos D1 connect with server to collect information, do tasks. Arduino Mega receive signals from Wemos and make physical updates such as moving landing platform, LED indication and other more.
|
|
|
|
After completing mission Wemos send request to a server to confirm updates on the server.
|
|
|
|
## Clover flight
|
|
|
|
We're using recursive landing algorithm to achieve success landing. Small ArUco marker is on the landing platform. Camera can use this marker on the ~25cm height. Next drone use standard landing.
|
|
|
|
## Visit our landing and API page
|
|
|
|
[https://qcs.pythonanywhere.com/](https://qcs.pythonanywhere.com/)
|
|
|
|
## Source code
|
|
|
|
Of that project is in our [GitHub page](https://github.com/qcs-charge/).
|
|
|
|
## Team
|
|
|
|
CH2023, Lyceum 128.
|
|
|
|
- Mikhail Konstantinov, [@mikemka](https://t.me/mikemka/), programmer.
|
|
- Julia Shvecova, [@Juli_Phil](https://t.me/Juli_Phil/), science adviser.
|
|
- Oleg Sherstobitov, [@kulumuluu](https://t.me/kulumuluu/), constructor.
|