mirror of
https://github.com/CopterExpress/clover.git
synced 2026-05-26 11:43:25 +00:00
docs: fix some issues with CopterHack-2023 articles
This commit is contained in:
@@ -46,26 +46,33 @@ The CloverSim platform offers a seamless workflow for users:
|
||||
|
||||
1. Users can effortlessly select or create a workspace and task and
|
||||
launch them with ease.
|
||||
|
||||

|
||||
|
||||
2. After launching the simulation, users are presented with CloverSim WebUI that
|
||||
provides them with an intuitive way to view their scores and progress,
|
||||
control the simulator, and access task descriptions and scoring information.
|
||||
From it users can open terminal, gzweb and more importantly they can easily
|
||||
access the CloverSim IDE to solve task.
|
||||
|
||||

|
||||
|
||||
3. The IDE provides a full suite of tools and features for writing and
|
||||
debugging code. One example is autocompletion to help streamline the
|
||||
development process, making it more efficient and effective.
|
||||
|
||||

|
||||
|
||||
4. Users can launch their programs with ease and monitor its progress via
|
||||
the GZWeb, CopterStatus, and SimulatorStatus views of the IDE.
|
||||
|
||||

|
||||
|
||||
5. Users can track their progress and scores in real-time and effortlessly
|
||||
restart the simulator if necessary. Additionally, different randomization
|
||||
seed can be set to check various inputs and outcomes.
|
||||
|
||||
We also have video demonstration/tutorial: [link](https://www.youtube.com/watch?v=aPOPHD3M3ZM)
|
||||
We also have video demonstration/tutorial: [link](https://www.youtube.com/watch?v=aPOPHD3M3ZM).
|
||||
|
||||
## More features
|
||||
|
||||
|
||||
@@ -26,7 +26,7 @@ The list of our team members:
|
||||
|
||||
Clover Cloud Platform is an innovative platform that enables users to access COEX Clover drone simulation online, without the need to download any programs or virtual machines.
|
||||
|
||||
>**Visit our [documentation](https://docs.clovercloud.software) to learn all about the platform, its development and how to use it.**
|
||||
> **Note** Visit our [documentation](https://docs.clovercloud.software) to learn all about the platform, its development and how to use it.
|
||||
|
||||
## Unleash Your Coding Power: Develop Autonomous Flight Code at Lightning Speed on Clover Cloud Platform
|
||||
|
||||
@@ -41,9 +41,7 @@ So why wait to unleash your coding power? Sign up for our platform today and dis
|
||||
Our platform is incredibly user-friendly and provides seamless access to the simulation in just a few clicks. Together with a simulator that displays simulation data accurately and without delay, there is a map editor allows users to edit the ArUco marker map and add or modify other objects on the scene directly within the simulation window. Additionally, users can create pre-configured workspaces complete with autonomous flight code and simulation scene configuration. Each user can also create their templates or apply a pre-made one to their workspace in just a few clicks. In addition to its other features, Clover Cloud Platform provides users with a convenient code editor for autonomous flight coding. Users can write code in the built-in editor and run it directly from the editor, viewing program output in real-time in the terminal. The platform also includes a file manager that simplifies file manipulation tasks, further enhancing the user's overall experience. With these tools at your fingertips, Clover Cloud Platform delivers an unparalleled level of accessibility and convenience for autonomous flight simulation.
|
||||
|
||||
<p align="center">
|
||||
|
||||
|
||||
|
||||
<img src="https://raw.githubusercontent.com/Clover-Cloud-Platform/clover-cloud-platform-frontend/master/docs/workspace.png" alt="Workspace screenshot">
|
||||
</p>
|
||||
|
||||
## The CodeSandbox for COEX Clover
|
||||
@@ -65,9 +63,7 @@ After creating an account, you will be taken to the [dashboard](https://clovercl
|
||||
>Workspaces are containers with Gazebo simulator and our software that provide data flow for simulation visualization, as well as handle requests from file manager, code editor and terminal.
|
||||
|
||||
<p align="center">
|
||||
|
||||
|
||||
|
||||
<img src="https://raw.githubusercontent.com/Clover-Cloud-Platform/clover-cloud-platform-frontend/master/docs/instances.gif" alt="Instance management">
|
||||
</p>
|
||||
|
||||
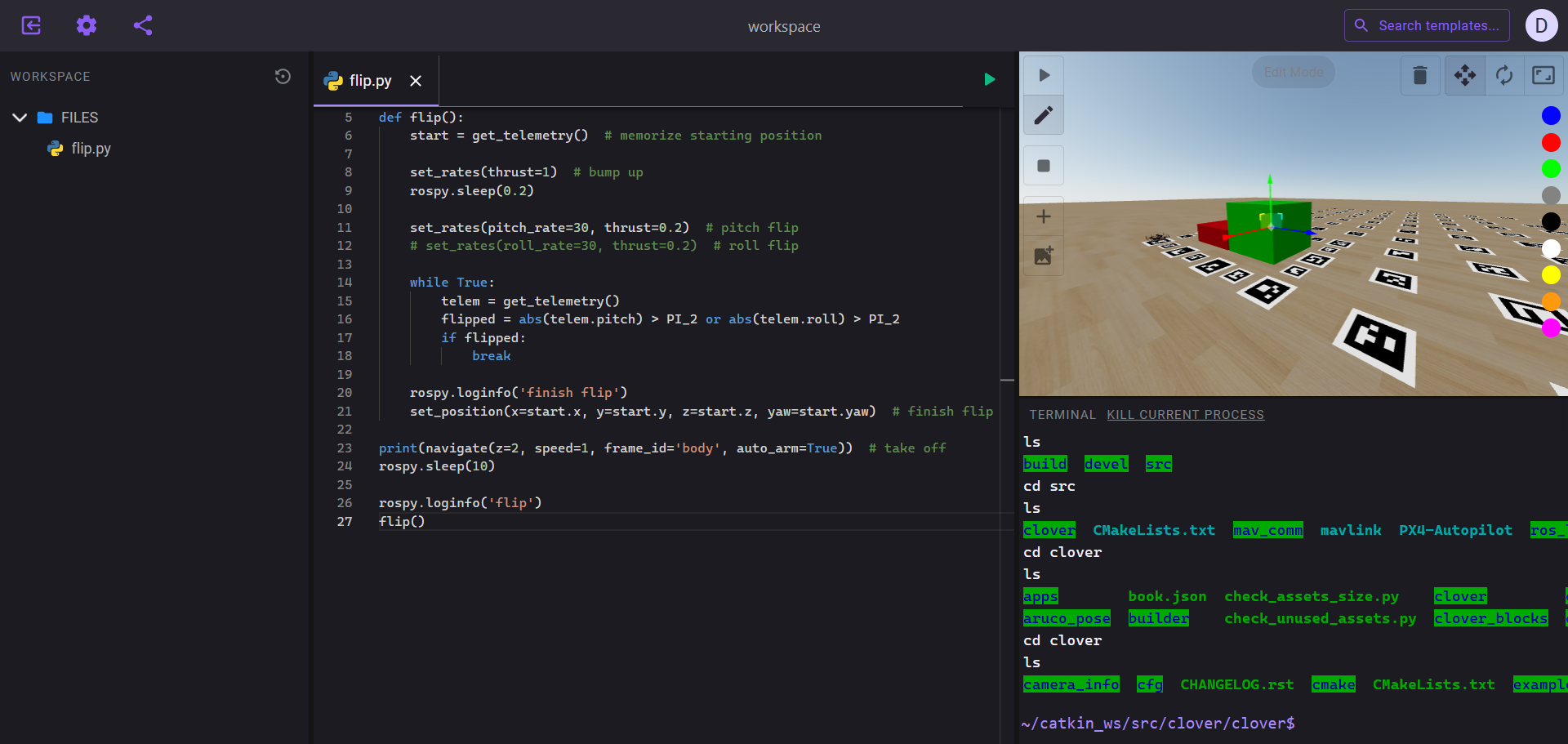
### Workspace overview
|
||||
@@ -75,9 +71,7 @@ After creating an account, you will be taken to the [dashboard](https://clovercl
|
||||
In the workspace, in addition to the simulator, you have a file manager, code editor and terminal. There is also an editing mode in the simulator - one of the key features of our project. It allows you to quickly and conveniently edit the simulation scene, namely: move ArUco markers, change their size, change id of the marker, load instead of marker picture, add new markers or delete them. You can also add 3d objects to the scene and change their position, size and color. Below is an example of working with our workspace.
|
||||
|
||||
<p align="center">
|
||||
|
||||

|
||||
|
||||
<img src="https://github.com/Clover-Cloud-Platform/clover-cloud-platform-frontend/raw/master/docs/workspace.gif" alt="Workspace overview">
|
||||
</p>
|
||||
|
||||
### Templates
|
||||
@@ -87,8 +81,11 @@ Templates are another key feature of our platform.Is there something you can't d
|
||||
## About the development of the platform
|
||||
|
||||
Our team has worked tirelessly to develop a simple yet multifunctional platform. We utilized the most modern standards and tools and implemented numerous optimization methods to ensure seamless performance and error-free operation. The frontend programming language chosen was JavaScript with the React framework, as a design system we utilizing Material Design style for an elegant and intuitive user interface. With the help of GitHub Actions the website is being built and deployed to Firebase hosting. The platform's backend is written in Python and contains multiple simultaneously running scripts. User data is secured and stored in a MongoDB database. Communication between the server and site is enabled through web sockets and the socket.io library, guaranteeing lightning-fast data transfer with minimal lag.
|
||||
>You can view the source code of our platform by clicking on the links below.<br/>
|
||||
[Repository with the frontend-side code](https://github.com/Clover-Cloud-Platform/clover-cloud-platform-frontend)<br/>
|
||||
|
||||
You can view the source code of our platform by clicking on the links below:
|
||||
|
||||
[Repository with the frontend-side code](https://github.com/Clover-Cloud-Platform/clover-cloud-platform-frontend)
|
||||
|
||||
[Repository with the backend-side code](https://github.com/Clover-Cloud-Platform/clover-cloud-platform-backend)
|
||||
|
||||
## Conclusion
|
||||
|
||||
@@ -34,13 +34,13 @@ This year, our team DJS Phoenix, presents to you a fully Autonomous Racing Drone
|
||||
|
||||
### Project Idea
|
||||
|
||||
This project proposes to develop an autonomous racing drone that can navigate through complex courses at high speeds while avoiding obstacles and detecting changes in the environment.In racing competitions, autonomous drones can compete in high-speed, precision races that challenge their agility, speed, and accuracy. These competitions could be held in indoor arenas or outdoor tracks, and they could attract enthusiasts and spectators from all over the world. With their advanced capabilities, autonomous racing drones could usher in a new era of racing events that are more exciting and challenging than ever before.From racing competitions to search and rescue operations, the autonomous racing drone can be used in a wide range of applications that benefit individuals, businesses, and society as a whole.
|
||||
This project proposes to develop an autonomous racing drone that can navigate through complex courses at high speeds while avoiding obstacles and detecting changes in the environment. In racing competitions, autonomous drones can compete in high-speed, precision races that challenge their agility, speed, and accuracy. These competitions could be held in indoor arenas or outdoor tracks, and they could attract enthusiasts and spectators from all over the world. With their advanced capabilities, autonomous racing drones could usher in a new era of racing events that are more exciting and challenging than ever before. From racing competitions to search and rescue operations, the autonomous racing drone can be used in a wide range of applications that benefit individuals, businesses, and society as a whole.
|
||||
|
||||
## Potential Outcome
|
||||
|
||||
### Problem
|
||||
|
||||
In many industries and applications, there is a need for fast, efficient, and safe movement of goods and information.Drones have become an increasingly popular tool for a wide range of applications, from aerial photography to surveying and monitoring. However, operating a drone requires a certain level of skill and experience, which can be a barrier for individuals or businesses who want to take advantage of this technology. Additionally, traditional drones can be expensive and time-consuming to operate, limiting their accessibility and effectiveness. Therefore, there is a need for a more user-friendly and affordable solution that can expand the use of drones to new audiences and applications.
|
||||
In many industries and applications, there is a need for fast, efficient, and safe movement of goods and information. Drones have become an increasingly popular tool for a wide range of applications, from aerial photography to surveying and monitoring. However, operating a drone requires a certain level of skill and experience, which can be a barrier for individuals or businesses who want to take advantage of this technology. Additionally, traditional drones can be expensive and time-consuming to operate, limiting their accessibility and effectiveness. Therefore, there is a need for a more user-friendly and affordable solution that can expand the use of drones to new audiences and applications.
|
||||
|
||||
### Solution
|
||||
|
||||
@@ -50,6 +50,6 @@ The solution to the above problem statement is an autonomous racing drone. An au
|
||||
|
||||
### Additional Information
|
||||
|
||||
In 2017, a student committee for DJS Phoenix was formed. In India, our team has participated in a number of contests, including IDRL-IIT GandhiNagar (sixth rank), IDRL-SVPCET Nagpur(second rank) and TECHNOXIAN (second place out of 50 national teams) .In COPTERHACK-2021, our team participated, and we placed eighth internationally. We are back with improved concepts after learning from the previous season.
|
||||
In 2017, a student committee for DJS Phoenix was formed. In India, our team has participated in a number of contests, including IDRL-IIT GandhiNagar (sixth rank), IDRL-SVPCET Nagpur(second rank) and TECHNOXIAN (second place out of 50 national teams). In CopterHack-2021, our team participated, and we placed eighth internationally. We are back with improved concepts after learning from the previous season.
|
||||
|
||||
For more information checkout gitbook: https://djs-phoenix.gitbook.io/chetak-faster-than-you-can-imagine/.
|
||||
|
||||
@@ -28,7 +28,7 @@ The list of team members:
|
||||
## Educational Document {#item-two}
|
||||
|
||||
**My Gitbook, with detailed step by step analysis of the proposed project during the CopterHack 2023 competition can be found:**
|
||||
[MoCap Clover Gitbook](https://0406hockey.gitbook.io/mocap-clover/)
|
||||
[MoCap Clover Gitbook](https://0406hockey.gitbook.io/mocap-clover/).
|
||||
|
||||
This page gives a broad overview on the motivation and purpose behind this project, it also provides research and industry based knowledge around UAV application that the reader may find interesting. If the user is interested in the technical details and implementation then refer to the educational Gitbook document.
|
||||
|
||||
|
||||
Reference in New Issue
Block a user