# Навигация по картам ArUco-маркеров
> **Note** Документация для версий [образа](image.md), начиная с версии **0.22**. Для более ранних версий см. [документацию для версии **0.20**](https://github.com/CopterExpress/clover/blob/v0.20/docs/ru/aruco_map.md).
> **Info** Для распознавания маркеров модуль камеры должен быть корректно подключен и [сконфигурирован](camera.md).
> **Hint** Рекомендуется использование [специальной сборки PX4 для Клевера](firmware.md#прошивка-для-клевера).
Модуль `aruco_map` распознает карты ArUco-маркеров, как единое целое. Также возможна навигация по картам ArUco-маркеров с использованием механизма Vision Position Estimate (VPE).
## Конфигурирование
Аргумент `aruco` в файле `~/catkin_ws/src/clover/clover/launch/clover.launch` должен быть в значении `true`:
```xml
```
Для включения распознавания карт маркеров аргументы `aruco_map` и `aruco_detect` в файле `~/catkin_ws/src/clover/clover/launch/aruco.launch` должны быть в значении `true`:
```xml
```
Для включения передачи координат в полетный контроллер по механизму VPE, аргумента `aruco_vpe` должен быть в значении `true`:
```xml
```
## Настройка карты маркеров
Карта загружается из текстового файла, каждая строка которого имеет следующий формат:
```
id_маркера размер_маркера x y z угол_z угол_y угол_x
```
Где `угол_N` – это угол поворота маркера вокруг оси N в радианах.
Файлы карт располагаются в каталоге `~/catkin_ws/src/clover/aruco_pose/map`. Название файла с картой задается в аргументе `map`:
```xml
```
Смотрите примеры карт маркеров в [`вышеуказанном каталоге`](https://github.com/CopterExpress/clover/tree/master/aruco_pose/map).
Файл карты может быть сгенерирован с помощью инструмента `genmap.py`:
```bash
rosrun aruco_pose genmap.py length x y dist_x dist_y first -o test_map.txt
```
Где `length` – размер маркера, `x` – количество маркеров по оси *x*, `y` - количество маркеров по оси *y*, `dist_x` – расстояние между центрами маркеров по оси *x*, `y` – расстояние между центрами маркеров по оси *y*, `first` – ID первого (левого нижнего) маркера, `test_map.txt` – название файла с картой. Дополнительный ключ `--bottom-left` позволяет нумеровать маркеры с левого нижнего угла.
Пример:
```bash
rosrun aruco_pose genmap.py 0.33 2 4 1 1 0 -o test_map.txt
```
Дополнительную информацию по утилите можно получить по ключу `-h`: `rosrun aruco_pose genmap.py -h`.
### Проверка
Для контроля карты, по которой в данный момент коптер осуществляет навигацию, можно просмотреть содержимое топика `/aruco_map/image`. Через браузер его можно просмотреть при помощи [web_video_server](web_video_server.md) по ссылке http://192.168.11.1:8080/snapshot?topic=/aruco_map/image:
 Клевер публикует текущую позицию распознанной карты в топик `aruco_map/pose`. Также публикуется [TF-фрейм](frames.md) `aruco_map` (VPE выключен) или `aruco_map_detected` (VPE включен). Используя топик `aruco_map/visualization` можно визуализировать текущую карту маркеров в [rviz](rviz.md).
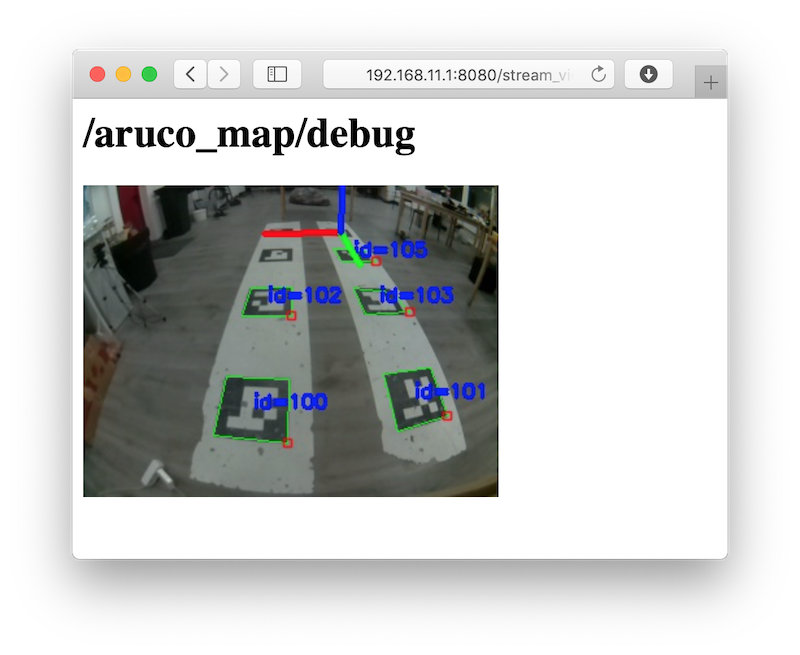
Наглядно позиция распознанной карты отображается в топике `aruco_map/debug` (просмотр доступен по ссылке http://192.168.11.1:8080/stream_viewer?topic=/aruco_map/debug):
Клевер публикует текущую позицию распознанной карты в топик `aruco_map/pose`. Также публикуется [TF-фрейм](frames.md) `aruco_map` (VPE выключен) или `aruco_map_detected` (VPE включен). Используя топик `aruco_map/visualization` можно визуализировать текущую карту маркеров в [rviz](rviz.md).
Наглядно позиция распознанной карты отображается в топике `aruco_map/debug` (просмотр доступен по ссылке http://192.168.11.1:8080/stream_viewer?topic=/aruco_map/debug):
 ## Система координат
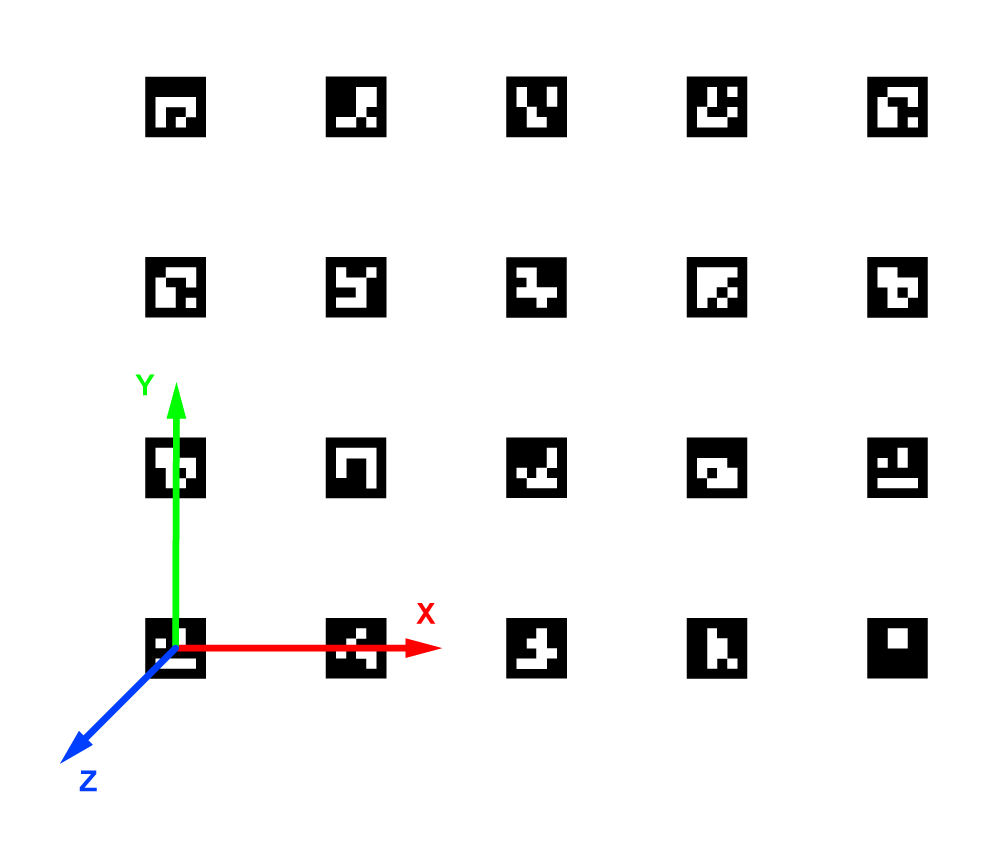
По [соглашению](http://www.ros.org/reps/rep-0103.html) в маркерном поле используется стандартная система координат ENU:
* ось **x** указывает на правую сторону карты маркеров;
* ось **y** указывает кверху карты маркеров;
* ось **z** указывает от плоскости карты маркеров.
## Система координат
По [соглашению](http://www.ros.org/reps/rep-0103.html) в маркерном поле используется стандартная система координат ENU:
* ось **x** указывает на правую сторону карты маркеров;
* ось **y** указывает кверху карты маркеров;
* ось **z** указывает от плоскости карты маркеров.
 ## Настройка VPE
Для работы механизма Vision Position Estimation необходимы следующие [настройки PX4](parameters.md).
При использовании **LPE** (параметр `SYS_MC_EST_GROUP` = `local_position_estimator, attitude_estimator_q`):
* В параметре `LPE_FUSION` включены флажки `vision position`, `land detector`. Флажок `baro` рекомендуется отключить.
* Вес угла по рысканью по зрению: `ATT_W_EXT_HDG` = 0.5
* Включена ориентация по Yaw по зрению: `ATT_EXT_HDG_M` = 1 `Vision`.
* Шумы позиции по зрению: `LPE_VIS_XY` = 0.1 m, `LPE_VIS_Z` = 0.1 m.
* `LPE_VIS_DELAY` = 0 sec.
При использовании **EKF2** (параметр `SYS_MC_EST_GROUP` = `ekf2`):
* В параметре `EKF2_AID_MASK` включены флажки `vision position fusion`, `vision yaw fusion`.
* Шум угла по зрению: `EKF2_EVA_NOISE` = 0.1 rad.
* Шум позиции по зрению: `EKF2_EVP_NOISE` = 0.1 m.
* `EKF2_EV_DELAY` = 0.
> **Hint** На данный момент для полета по маркерам рекомендуется использование **LPE**.
Для проверки правильности всех настроек можно [воспользоваться утилитой `selfcheck.py`](selfcheck.md).
> **Info** Для использования LPE в Pixhawk необходимо [скачать прошивку с названием `px4fmu-v2_lpe.px4`](https://github.com/PX4/Firmware/releases).
## Полет
При правильной настройке коптер начнет удерживать позицию в [режимах](modes.md) `POSCTL` и `OFFBOARD` автоматически.
Для [автономных полетов](simple_offboard.md) можно будет использовать функции `navigate`, `set_position`, `set_velocity`. Для полета в определенные координаты маркерного поля необходимо использовать фрейм `aruco_map`:
```python
# Вначале необходимо взлететь, чтобы коптер увидел карту меток и появился фрейм aruco_map:
navigate(x=0, y=0, z=2, frame_id='body', speed=0.5, auto_arm=True) # взлет на 2 метра
time.sleep(5)
# Полет в координату 2:2 маркерного поля, высота 2 метра
navigate(x=2, y=2, z=2, speed=1, frame_id='aruco_map') # полет в координату 2:2, высота 3 метра
```
### Полет в координаты по ID маркера
Начиная с версии [образа](image.md) 0.18, доступны также полёты относительно отдельного маркера в карте, даже если дрон его не видит. По аналогии с [навигацией по отдельным маркерам](aruco_marker.md#навигация-по-маркерам) при настройке карты маркеров дрон сможет лететь в координаты относительно отдельного маркера, используя фрейм `aruco_ID` с соответствующим ID маркера.
Полет в точку над маркером 5 на высоту 1 метр:
```python
navigate(frame_id='aruco_5', x=0, y=0, z=1)
```
## Дополнительные настройки
Если коптер нестабильно удерживает позицию по VPE, попробуйте увеличить коэффициенты *P* PID-регулятора по скорости – параметры `MPC_XY_VEL_P` и `MPC_Z_VEL_P`.
Если коптер нестабильно удерживает высоту, попробуйте увеличить коэффициент `MPC_Z_VEL_P` или лучше подобрать газ висения – `MPC_THR_HOVER`.
## Расположение маркеров на потолке

Для навигации по маркерам, расположенным на потолке, необходимо поставить основную камеру так, чтобы она смотрела вверх и [установить соответствующий фрейм камеры](camera_setup.md#frame).
Также в файле `~/catkin_ws/src/clover/clover/launch/aruco.launch` необходимо выставить аргумент `placement` в значение `ceiling`:
```xml
```
Технология [Optical Flow](optical_flow.md) не может нормально работать при таком расположении камеры, поэтому в файле `~/catkin_ws/src/clover/clover/launch/clover.launch` ее следует отключить:
```xml
```
При такой конфигурации фрейм `aruco_map` также окажется перевернутым. Таким образом, для полета на высоту 2 метра ниже потолка, аргумент `z` нужно устанавливать в 2:
```python
navigate(x=1, y=2, z=1.1, speed=0.5, frame_id='aruco_map')
```
## Настройка VPE
Для работы механизма Vision Position Estimation необходимы следующие [настройки PX4](parameters.md).
При использовании **LPE** (параметр `SYS_MC_EST_GROUP` = `local_position_estimator, attitude_estimator_q`):
* В параметре `LPE_FUSION` включены флажки `vision position`, `land detector`. Флажок `baro` рекомендуется отключить.
* Вес угла по рысканью по зрению: `ATT_W_EXT_HDG` = 0.5
* Включена ориентация по Yaw по зрению: `ATT_EXT_HDG_M` = 1 `Vision`.
* Шумы позиции по зрению: `LPE_VIS_XY` = 0.1 m, `LPE_VIS_Z` = 0.1 m.
* `LPE_VIS_DELAY` = 0 sec.
При использовании **EKF2** (параметр `SYS_MC_EST_GROUP` = `ekf2`):
* В параметре `EKF2_AID_MASK` включены флажки `vision position fusion`, `vision yaw fusion`.
* Шум угла по зрению: `EKF2_EVA_NOISE` = 0.1 rad.
* Шум позиции по зрению: `EKF2_EVP_NOISE` = 0.1 m.
* `EKF2_EV_DELAY` = 0.
> **Hint** На данный момент для полета по маркерам рекомендуется использование **LPE**.
Для проверки правильности всех настроек можно [воспользоваться утилитой `selfcheck.py`](selfcheck.md).
> **Info** Для использования LPE в Pixhawk необходимо [скачать прошивку с названием `px4fmu-v2_lpe.px4`](https://github.com/PX4/Firmware/releases).
## Полет
При правильной настройке коптер начнет удерживать позицию в [режимах](modes.md) `POSCTL` и `OFFBOARD` автоматически.
Для [автономных полетов](simple_offboard.md) можно будет использовать функции `navigate`, `set_position`, `set_velocity`. Для полета в определенные координаты маркерного поля необходимо использовать фрейм `aruco_map`:
```python
# Вначале необходимо взлететь, чтобы коптер увидел карту меток и появился фрейм aruco_map:
navigate(x=0, y=0, z=2, frame_id='body', speed=0.5, auto_arm=True) # взлет на 2 метра
time.sleep(5)
# Полет в координату 2:2 маркерного поля, высота 2 метра
navigate(x=2, y=2, z=2, speed=1, frame_id='aruco_map') # полет в координату 2:2, высота 3 метра
```
### Полет в координаты по ID маркера
Начиная с версии [образа](image.md) 0.18, доступны также полёты относительно отдельного маркера в карте, даже если дрон его не видит. По аналогии с [навигацией по отдельным маркерам](aruco_marker.md#навигация-по-маркерам) при настройке карты маркеров дрон сможет лететь в координаты относительно отдельного маркера, используя фрейм `aruco_ID` с соответствующим ID маркера.
Полет в точку над маркером 5 на высоту 1 метр:
```python
navigate(frame_id='aruco_5', x=0, y=0, z=1)
```
## Дополнительные настройки
Если коптер нестабильно удерживает позицию по VPE, попробуйте увеличить коэффициенты *P* PID-регулятора по скорости – параметры `MPC_XY_VEL_P` и `MPC_Z_VEL_P`.
Если коптер нестабильно удерживает высоту, попробуйте увеличить коэффициент `MPC_Z_VEL_P` или лучше подобрать газ висения – `MPC_THR_HOVER`.
## Расположение маркеров на потолке

Для навигации по маркерам, расположенным на потолке, необходимо поставить основную камеру так, чтобы она смотрела вверх и [установить соответствующий фрейм камеры](camera_setup.md#frame).
Также в файле `~/catkin_ws/src/clover/clover/launch/aruco.launch` необходимо выставить аргумент `placement` в значение `ceiling`:
```xml
```
Технология [Optical Flow](optical_flow.md) не может нормально работать при таком расположении камеры, поэтому в файле `~/catkin_ws/src/clover/clover/launch/clover.launch` ее следует отключить:
```xml
```
При такой конфигурации фрейм `aruco_map` также окажется перевернутым. Таким образом, для полета на высоту 2 метра ниже потолка, аргумент `z` нужно устанавливать в 2:
```python
navigate(x=1, y=2, z=1.1, speed=0.5, frame_id='aruco_map')
```