# Аэротакси
Проект команды Human Express на проектной программе "Большие Вызовы"
## Суть проекта
Крупные города страдают из-за пробок и перегруженности транспорта. Пробки на дорогах и перегруженность транспорта влечёт за собой многие неудобства. Одной из таких проблем является отсутствие возможности быстро добраться из точки А в точку Б. При этом воздушное пространство практически не используется. Предлагаемое решение заключается в создании системы, которая в режиме реального времени наблюдает и контролирует движение беспилотных летательных аппаратов. Такое решение приводит к полной автоматизации процесса полёта и исключает возможность воздушно-транспортных происшествий. В результате проделанной работы удалось сделать систему, которая состоит из нескольких дронов и сервера. Сервер прокладывает маршрут дронам из начальной точки в заданную по проложенным дорогам. Также в работу сервера входит логистика, благодаря которой беспилотники не сталкиваются в полёте.
## Настройка сервера
Чтобы скачать проект на сервер выполните команду
```bash
git clone https://github.com/Tennessium/HUEX
```
Перед началом работы с системой необходимо подключить устройство к сети WiFi (например, раздать со смартфона) установить на него необходимые библиотеки
```bash
cd HUEX/server
pip install -r requirements.txt
```
В случае необходимости вы можете изменить высоту эшелонов и разрешенные IP-адреса для доступа к Центру управления полетами в файле *server/consts.py* и настроить поле с метками в *server/static/map.txt*.
Теперь можно запустить сервер написав в командную строку
```bash
python manage.py runserver 0.0.0.0:8000
```
Чтобы перейти на веб страницу наберите в адресной строке ip адрес сервера в локальной сети и укажите порт 8000 (`http://ip:8000`).
[Как узнать ip адрес устройства](https://remontka.pro/ip-adres/)
## Настройка коптеров
В первую очередь подготовьте SD-карту с образом Clover ([Инструкция](image.md))
Чтобы скачать проект на Raspberry Pi в коптере выполните команду
```bash
git clone https://github.com/Tennessium/HUEX
```
Перед началом работы с системой необходимо перевести коптеры в режим клиента и подключить к сети WiFi. Вы можете воспользоваться [этим мануалом](network.md#переключение-адаптера-в-режим-клиента)
Однако, для упрощения развертывания системы на нескольких коптреах, рекомендуется использование нашего скрипта, лежащего в папке *copter/setup/*
- Перейдите в папку
```bash
cd HUEX/copter/setup/
```
- Используя любой редактор, в файле *networkData.txt* измените SSID и пароль сети
- Запустите скрипт
```bash
sudo bash networkEdit.sh
```
- Перезагрузите Raspberry Pi
Произведите установку и настройку ROS-пакета для LED-ленты
```bash
cd ~/catkin_ws/src
git clone https://github.com/bart02/ros-led-lib.git led
cd led
```
Воспользовавшись nano ledsub.py, измените переменную LED_COUNT на число светодиодов на вашей ленте
```bash
chmod +x ledsub.py
cd ~/catkin_ws
catkin_make
sudo systemctl enable /home/pi/catkin_ws/src/led/led.service
sudo systemctl start led
```
Установите необходимые пакеты
```bash
cd HUEX/clever
pip install -r requirements.txt
```
В файле *copter/consts.py* укажите IP-адрес сервера.
Для запуска основного скрипта воспользуйтсь нашим systemd-сервисом.
```bash
sudo systemctl enable /home/pi/HUEX/clever/setup/taxi.service
sudo systemctl start taxi.service
```
Скрипт будет запускаться автоматически при старте системы.
Для остановки можно воспользоваться командой
```bash
sudo systemctl stop taxi.service
```
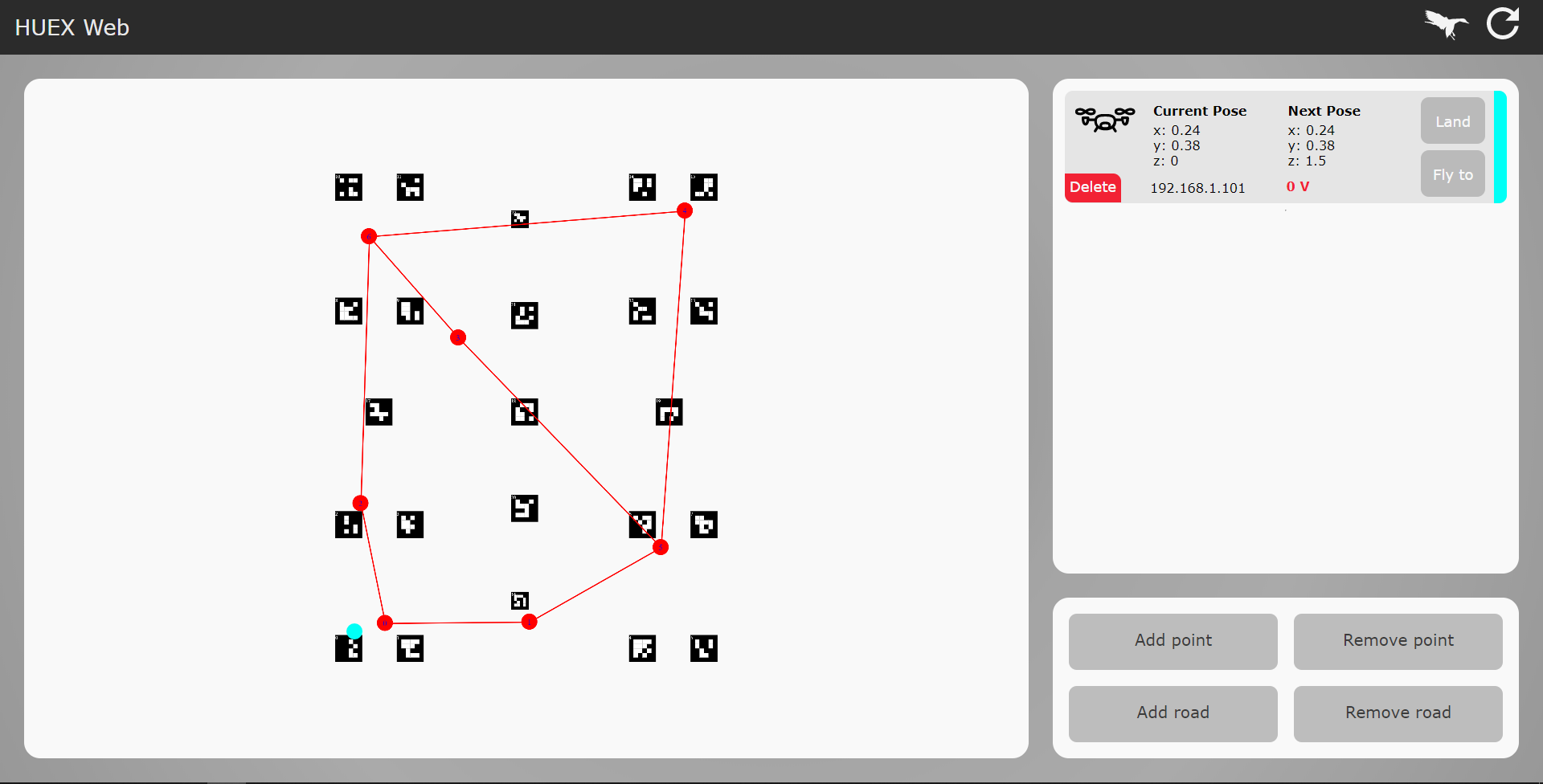
## Веб-интерфейс центра управления полётами
В данном веб интерфейсе можно следить за полётами всех дронов на карте (масштабировать с помощью колёсика, передвигаять с помощью Alt). При нажатии на лебедя в правом верхнем углу все коптеры аварийно садятся, А при нажатии на значок "обновить" все коптеры автоматически удаляются, что приводит к удалению всех комманд и посадке активных на текущий момент коптеров.
С помощью инструментов в правом нижнем углу можно строить новые основания и рёбра.
## Веб-интерфейс заказа
Чтобы перейти на веб страницу наберите в адресной строке `http://ip:8000/m`, где *ip* - адрес сервера в сети.
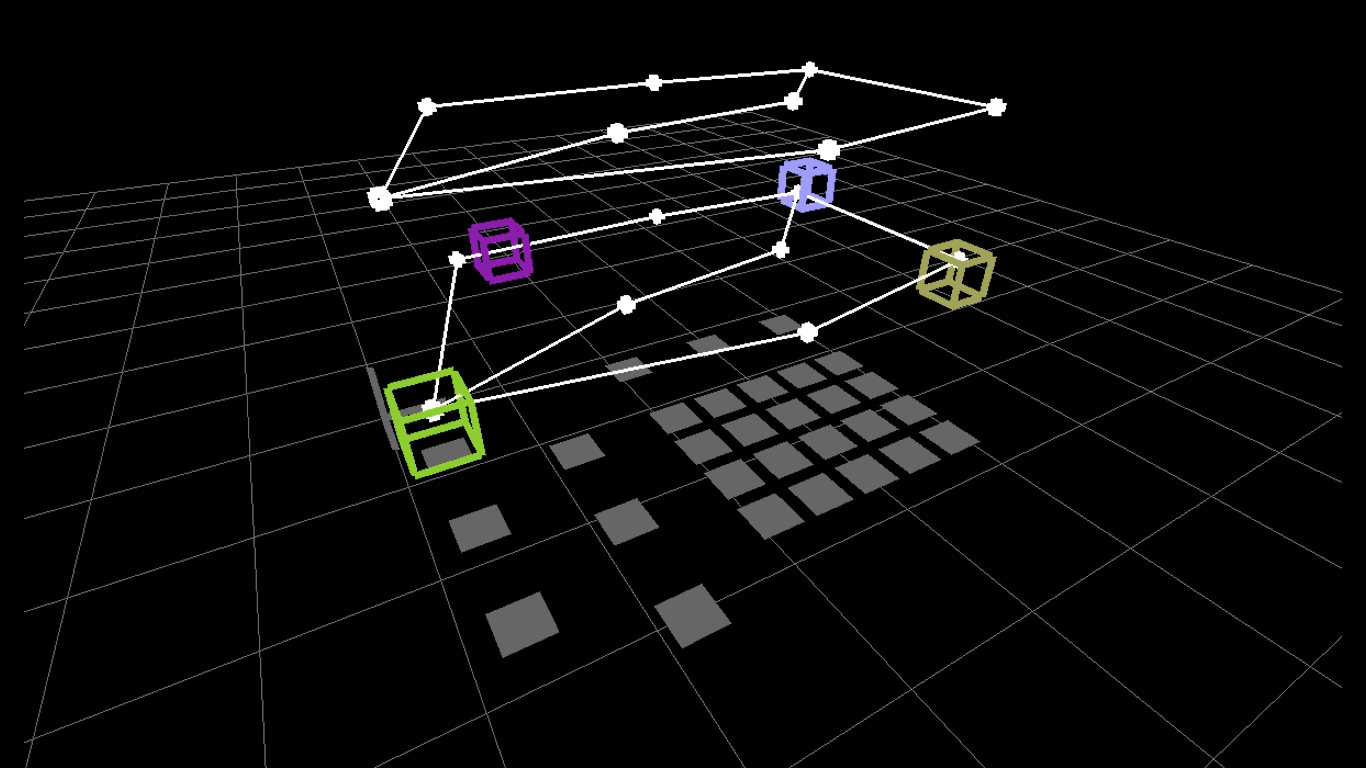
## Визуализатор
Для наглядности работы системы был разработан 3D-визуализатор воздушного пространства. Он отображает систему эшелонов, поле ArUco-маркеров; позиции коптеров и направления их движения в real-time.
Запускать визуализатор можно после старта сервера. Компьютер должен быть подключен к той же сети, что и сервер.
```bash
cd viz
python main.py
```
Программа автоматически подгрузит карты маркеров и эшелонов. Если одна из них изменяется в процессе эксплуатации, перезагрузите программу для внесения изменений.
>Камеру можно передвигать при помощи клавиш *WASD* и поворачивать при помощи стрелок.
## DDoS-скрипт
Во время смены был написан простой скрипт, предназначенный для тестирования логистики. Его суть заключается в бесконечном заказе такси между случайными точками. Перед тем как запустить программу [*DDos.py*](https://github.com/Tennessium/HUEX/blob/master/DDos.py) замените параметр *static_path* в пятой строке на *ip* вашего сервера.
## API
На случай если вы захотите реализовать свою "обёртку" вы можете реализовать взаимодействие с сервером по средствам *HTTP/HTTPS* запросов
### /get
Возвращает телеметрию всех доступных коптеров.
Пример:
```json
{
"message": "OK",
"drones": [
{
"ip": "192.168.1.101",
"led": "#FF0000",
"status": "land",
"pose": {
"x": 0.24,
"y": 0.38,
"z": 0,
"yaw": 0
},
"voltage": 4.12,
"nextp": {
"led": "#FF0000",
"status": "land",
"pose": {
"x": 0.24,
"y": 0.38,
"z": 1.5,
"yaw": 0
}
}
}
]
}
```
Где
- **ip** - ip адрес коптера
- **led** - цвет светодиодной ленты
- **status** - *fly* или *land* - текущий статус коптера
- **pose** - позиция коптера (*x*, *y*, *z*, и *yaw*)
- **voltage** - напряжение на одной банке
- **nextp** - отдаваемая коптеру команда на полёт (*led*, *status*, *pose* как выше)
### /static/roads.json
Текущая карта дорог первого эшелона
Пример:
```json
{
"points": [
{
"x": 2.1,
"y": 3.5
},
{
"x": 0.6,
"y": 0.4
},
{
"x": 2.4,
"y": 0.5
}
],
"lines": [
{
"1": 2,
"2": 1
},
{
"1": 1,
"2": 0
}
]
}
```
Где
- **poits** - массив вершин графа и их координат
- **lines** - массив рёбер графа (*1* - точка из которой выходит ребро, *2* - точка куда это ребро направлено)
### /ask_taxi?o=x&t=y
Заказ такси из точки под номером *x* в точку под номером *y*. Точки *x* и *y* берутся из **/static/roads.json**
### /get_dist?o=x&t=y
Возвращает расстояние и цену за пролёт между точками.
Пример:
```json
{"dist": 5.3, "cost": 309}
```
Где
- **dist** - Дистанция в метрах
- **cost** - Цена в рублях (150₽ + 30₽ * *n* метров)
 В данном веб интерфейсе можно следить за полётами всех дронов на карте (масштабировать с помощью колёсика, передвигаять с помощью Alt). При нажатии на лебедя в правом верхнем углу все коптеры аварийно садятся, А при нажатии на значок "обновить" все коптеры автоматически удаляются, что приводит к удалению всех комманд и посадке активных на текущий момент коптеров.
С помощью инструментов в правом нижнем углу можно строить новые основания и рёбра.
## Веб-интерфейс заказа
Чтобы перейти на веб страницу наберите в адресной строке `http://ip:8000/m`, где *ip* - адрес сервера в сети.
## Визуализатор
Для наглядности работы системы был разработан 3D-визуализатор воздушного пространства. Он отображает систему эшелонов, поле ArUco-маркеров; позиции коптеров и направления их движения в real-time.
Запускать визуализатор можно после старта сервера. Компьютер должен быть подключен к той же сети, что и сервер.
```bash
cd viz
python main.py
```
Программа автоматически подгрузит карты маркеров и эшелонов. Если одна из них изменяется в процессе эксплуатации, перезагрузите программу для внесения изменений.
В данном веб интерфейсе можно следить за полётами всех дронов на карте (масштабировать с помощью колёсика, передвигаять с помощью Alt). При нажатии на лебедя в правом верхнем углу все коптеры аварийно садятся, А при нажатии на значок "обновить" все коптеры автоматически удаляются, что приводит к удалению всех комманд и посадке активных на текущий момент коптеров.
С помощью инструментов в правом нижнем углу можно строить новые основания и рёбра.
## Веб-интерфейс заказа
Чтобы перейти на веб страницу наберите в адресной строке `http://ip:8000/m`, где *ip* - адрес сервера в сети.
## Визуализатор
Для наглядности работы системы был разработан 3D-визуализатор воздушного пространства. Он отображает систему эшелонов, поле ArUco-маркеров; позиции коптеров и направления их движения в real-time.
Запускать визуализатор можно после старта сервера. Компьютер должен быть подключен к той же сети, что и сервер.
```bash
cd viz
python main.py
```
Программа автоматически подгрузит карты маркеров и эшелонов. Если одна из них изменяется в процессе эксплуатации, перезагрузите программу для внесения изменений.
 >Камеру можно передвигать при помощи клавиш *WASD* и поворачивать при помощи стрелок.
## DDoS-скрипт
Во время смены был написан простой скрипт, предназначенный для тестирования логистики. Его суть заключается в бесконечном заказе такси между случайными точками. Перед тем как запустить программу [*DDos.py*](https://github.com/Tennessium/HUEX/blob/master/DDos.py) замените параметр *static_path* в пятой строке на *ip* вашего сервера.
## API
На случай если вы захотите реализовать свою "обёртку" вы можете реализовать взаимодействие с сервером по средствам *HTTP/HTTPS* запросов
### /get
Возвращает телеметрию всех доступных коптеров.
Пример:
```json
{
"message": "OK",
"drones": [
{
"ip": "192.168.1.101",
"led": "#FF0000",
"status": "land",
"pose": {
"x": 0.24,
"y": 0.38,
"z": 0,
"yaw": 0
},
"voltage": 4.12,
"nextp": {
"led": "#FF0000",
"status": "land",
"pose": {
"x": 0.24,
"y": 0.38,
"z": 1.5,
"yaw": 0
}
}
}
]
}
```
Где
- **ip** - ip адрес коптера
- **led** - цвет светодиодной ленты
- **status** - *fly* или *land* - текущий статус коптера
- **pose** - позиция коптера (*x*, *y*, *z*, и *yaw*)
- **voltage** - напряжение на одной банке
- **nextp** - отдаваемая коптеру команда на полёт (*led*, *status*, *pose* как выше)
### /static/roads.json
Текущая карта дорог первого эшелона
Пример:
```json
{
"points": [
{
"x": 2.1,
"y": 3.5
},
{
"x": 0.6,
"y": 0.4
},
{
"x": 2.4,
"y": 0.5
}
],
"lines": [
{
"1": 2,
"2": 1
},
{
"1": 1,
"2": 0
}
]
}
```
Где
- **poits** - массив вершин графа и их координат
- **lines** - массив рёбер графа (*1* - точка из которой выходит ребро, *2* - точка куда это ребро направлено)
### /ask_taxi?o=x&t=y
Заказ такси из точки под номером *x* в точку под номером *y*. Точки *x* и *y* берутся из **/static/roads.json**
### /get_dist?o=x&t=y
Возвращает расстояние и цену за пролёт между точками.
Пример:
```json
{"dist": 5.3, "cost": 309}
```
Где
- **dist** - Дистанция в метрах
- **cost** - Цена в рублях (150₽ + 30₽ * *n* метров)
>Камеру можно передвигать при помощи клавиш *WASD* и поворачивать при помощи стрелок.
## DDoS-скрипт
Во время смены был написан простой скрипт, предназначенный для тестирования логистики. Его суть заключается в бесконечном заказе такси между случайными точками. Перед тем как запустить программу [*DDos.py*](https://github.com/Tennessium/HUEX/blob/master/DDos.py) замените параметр *static_path* в пятой строке на *ip* вашего сервера.
## API
На случай если вы захотите реализовать свою "обёртку" вы можете реализовать взаимодействие с сервером по средствам *HTTP/HTTPS* запросов
### /get
Возвращает телеметрию всех доступных коптеров.
Пример:
```json
{
"message": "OK",
"drones": [
{
"ip": "192.168.1.101",
"led": "#FF0000",
"status": "land",
"pose": {
"x": 0.24,
"y": 0.38,
"z": 0,
"yaw": 0
},
"voltage": 4.12,
"nextp": {
"led": "#FF0000",
"status": "land",
"pose": {
"x": 0.24,
"y": 0.38,
"z": 1.5,
"yaw": 0
}
}
}
]
}
```
Где
- **ip** - ip адрес коптера
- **led** - цвет светодиодной ленты
- **status** - *fly* или *land* - текущий статус коптера
- **pose** - позиция коптера (*x*, *y*, *z*, и *yaw*)
- **voltage** - напряжение на одной банке
- **nextp** - отдаваемая коптеру команда на полёт (*led*, *status*, *pose* как выше)
### /static/roads.json
Текущая карта дорог первого эшелона
Пример:
```json
{
"points": [
{
"x": 2.1,
"y": 3.5
},
{
"x": 0.6,
"y": 0.4
},
{
"x": 2.4,
"y": 0.5
}
],
"lines": [
{
"1": 2,
"2": 1
},
{
"1": 1,
"2": 0
}
]
}
```
Где
- **poits** - массив вершин графа и их координат
- **lines** - массив рёбер графа (*1* - точка из которой выходит ребро, *2* - точка куда это ребро направлено)
### /ask_taxi?o=x&t=y
Заказ такси из точки под номером *x* в точку под номером *y*. Точки *x* и *y* берутся из **/static/roads.json**
### /get_dist?o=x&t=y
Возвращает расстояние и цену за пролёт между точками.
Пример:
```json
{"dist": 5.3, "cost": 309}
```
Где
- **dist** - Дистанция в метрах
- **cost** - Цена в рублях (150₽ + 30₽ * *n* метров)