# Automatic check
Before flying (especially autonomous), you can use several methods of automatic self-testing of the quadcopter subsystems.
## selfcheck.py
Utility `selfcheck.py` is part of `clever` package, and automatically tests the main aspects of the ROS platform and the PX4. The utility is pre-installed on [the Raspberry Pi image](microsd_images.md).
To initiate it, type in [the Raspberry Pi console](ssh.md):
```(bash)
rosrun clever selfcheck.py
```
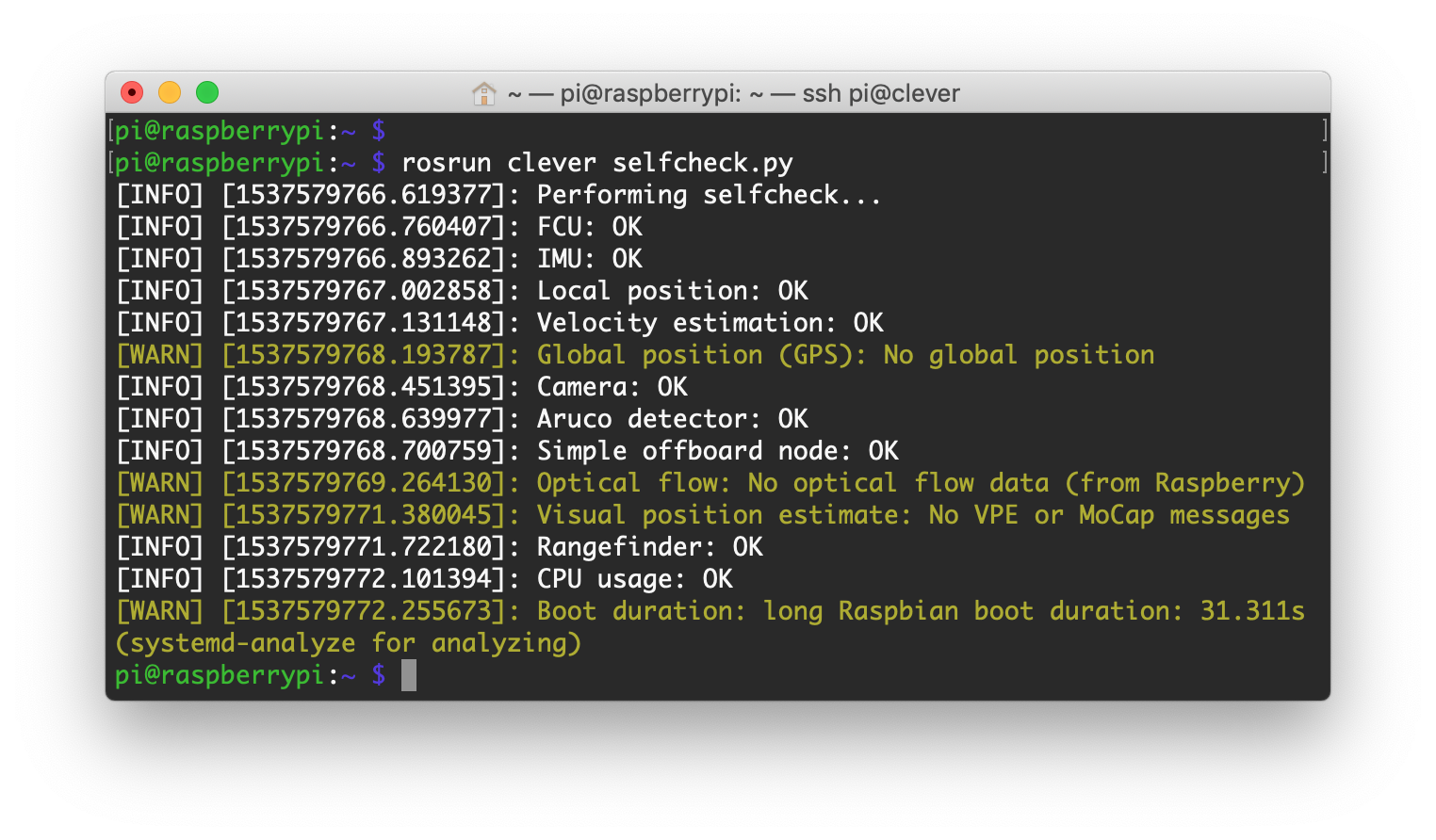 Description of some checks:
* FCU – checking proper connection with the flight controller;
* IMU – checking correctness of the data from IMU;
* Local position – presence of the local position of the drone;
* Velocity estimation – drone velocity estimation (**if this check fails, never take off offline!**);
* Global position (GPS) — presence of the global position (GPS required);
* Camera — proper operation of the Raspberry camera.
## commander check
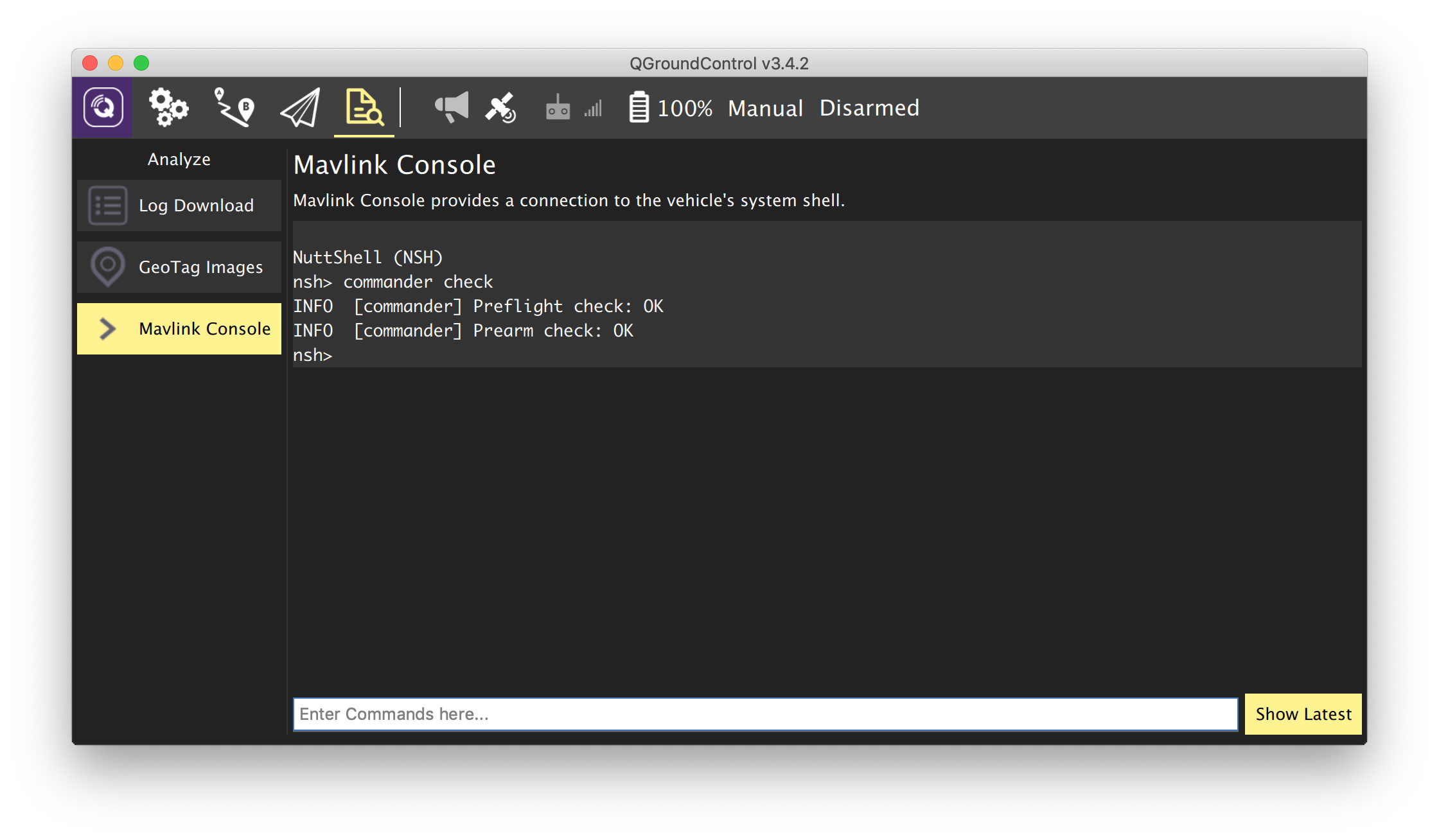
To check the main sub systems of PX4 and the possibility of arming at the moment, you can perform command `commander check` in the MAVLink console.
Description of some checks:
* FCU – checking proper connection with the flight controller;
* IMU – checking correctness of the data from IMU;
* Local position – presence of the local position of the drone;
* Velocity estimation – drone velocity estimation (**if this check fails, never take off offline!**);
* Global position (GPS) — presence of the global position (GPS required);
* Camera — proper operation of the Raspberry camera.
## commander check
To check the main sub systems of PX4 and the possibility of arming at the moment, you can perform command `commander check` in the MAVLink console.
 When using SITL instead of the MAVLink console, use a terminal with SITL running.
When using SITL instead of the MAVLink console, use a terminal with SITL running.