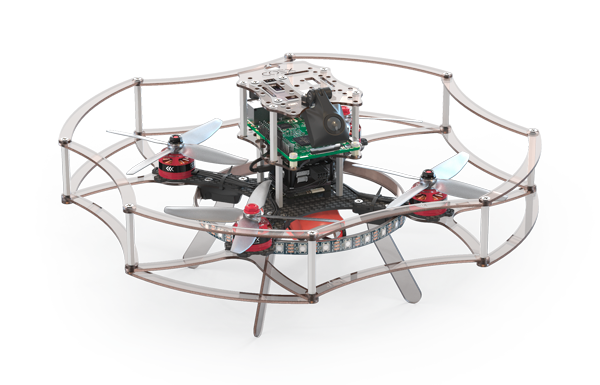
 «Клевер» — это учебный конструктор программируемого квадрокоптера, состоящего из популярных открытых компонентов, а также набор необходимой документации и библиотек для работы с ним.
Набор включает в себя полетный контроллер Pixhawk/Pixracer с полетным стеком PX4, Raspberry Pi 3 в качестве управляющего бортового компьютера, модуль камеры для реализации полетов с использованием компьютерного зрения, а также набор различных датчиков и другой периферии.
На базе точно такой же платформы были созданы многие «большие» проекты компании Copter Express, например, дроны для [пиар-акций по автономной доставке пиццы](https://www.youtube.com/watch?v=hmkAoZOtF58) (Самара, Казань); дрон-доставщик кофе в Сколково, мониторинговый дрон с зарядной станцией, дроны-победители на полевых испытаниях «[Робокросс-2016](https://www.youtube.com/watch?v=dGbDaz_VmYU)», «[Робокросс-2017](https://youtu.be/AQnd2CRczbQ)» и многие другие.
Для того, чтобы научиться собирать, настраивать, пилотировать и программировать автономный дрон «Клевер», воспользуйтесь этим учебником.
Если вы детально изучили наш gitbook, но так и не нашли ответа на свой вопрос, напишите в чат техподдержки и наши специалисты вам с радостью ответят: https://t.me/COEXHelpdesk.
Также у нас есть чат для программистов, которые разрабатывают под PX4, автономную навигацию в помещениях и рои дронов https://t.me/DroneCode.
The English version of this documentation is available.
Образ для Raspberry Pi
----------------------
**Образ ОС** для RPi 3 с предустановленным и преднастроенным ПО можно скачать [здесь](microsd_images.md).
Образ включает в себя:
* Raspbian Stretch
* ROS Kinetic
* Настроенную [работу с сетью](network.md)
* OpenCV
* mavros
* Набор ПО для работы с Клевером
[Описание API](simple_offboard.md) для автономных полетов.
Исходный код сборщика образа и всего ПО можно найти на [GitHub](https://github.com/CopterExpress/clever).
«Клевер» — это учебный конструктор программируемого квадрокоптера, состоящего из популярных открытых компонентов, а также набор необходимой документации и библиотек для работы с ним.
Набор включает в себя полетный контроллер Pixhawk/Pixracer с полетным стеком PX4, Raspberry Pi 3 в качестве управляющего бортового компьютера, модуль камеры для реализации полетов с использованием компьютерного зрения, а также набор различных датчиков и другой периферии.
На базе точно такой же платформы были созданы многие «большие» проекты компании Copter Express, например, дроны для [пиар-акций по автономной доставке пиццы](https://www.youtube.com/watch?v=hmkAoZOtF58) (Самара, Казань); дрон-доставщик кофе в Сколково, мониторинговый дрон с зарядной станцией, дроны-победители на полевых испытаниях «[Робокросс-2016](https://www.youtube.com/watch?v=dGbDaz_VmYU)», «[Робокросс-2017](https://youtu.be/AQnd2CRczbQ)» и многие другие.
Для того, чтобы научиться собирать, настраивать, пилотировать и программировать автономный дрон «Клевер», воспользуйтесь этим учебником.
Если вы детально изучили наш gitbook, но так и не нашли ответа на свой вопрос, напишите в чат техподдержки и наши специалисты вам с радостью ответят: https://t.me/COEXHelpdesk.
Также у нас есть чат для программистов, которые разрабатывают под PX4, автономную навигацию в помещениях и рои дронов https://t.me/DroneCode.
The English version of this documentation is available.
Образ для Raspberry Pi
----------------------
**Образ ОС** для RPi 3 с предустановленным и преднастроенным ПО можно скачать [здесь](microsd_images.md).
Образ включает в себя:
* Raspbian Stretch
* ROS Kinetic
* Настроенную [работу с сетью](network.md)
* OpenCV
* mavros
* Набор ПО для работы с Клевером
[Описание API](simple_offboard.md) для автономных полетов.
Исходный код сборщика образа и всего ПО можно найти на [GitHub](https://github.com/CopterExpress/clever).