# Автоматическая проверка
Перед полетом (особенно автономным) можно применить несколько методов автоматического самотестирования подсистем квадрокоптера.
## selfcheck.py
Утилита `selfcheck.py` является частью пакета `clever` и выполняет автоматическое тестирование основных аспектов ROS-платформы и PX4. Утилита предустановлена на [образе Raspberry Pi](microsd_images.md).
Для запуска наберите в [консоли Raspberry Pi](ssh.md):
```bash
rosrun clever selfcheck.py
```
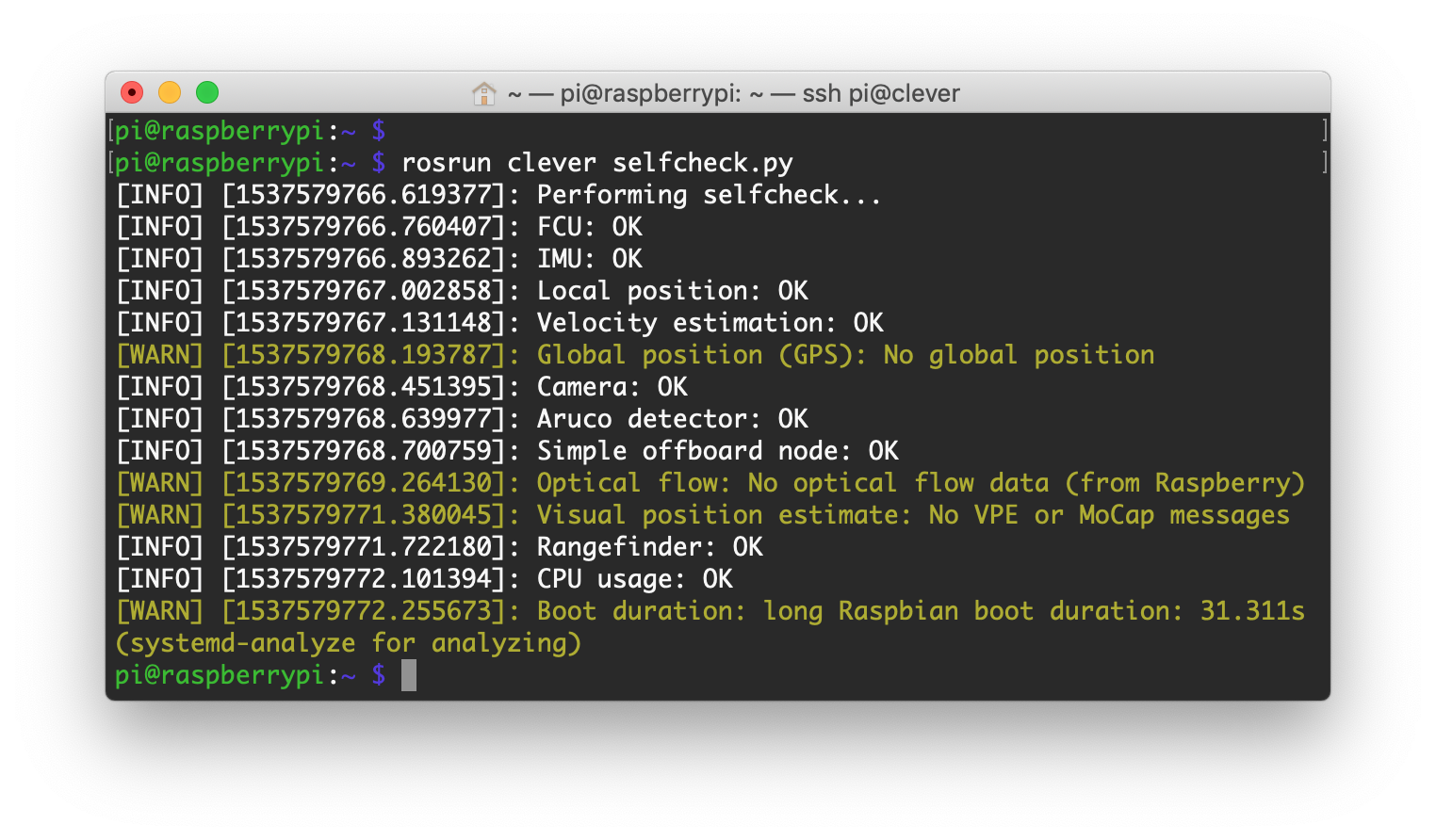 Описание некоторых проверок:
* FCU – проверка корректности соединения с полетным контроллером;
* IMU – проверка корректности данных с IMU;
* Local position – наличие локалной позиции дрона;
* Velocity estimation – оценка скоростей дрона (**запрещено выполнять автономный взлет при ошибках в этой проверке!**);
* Global position (GPS) – наличие глобальной позиции (требуется GPS);
* Camera – корректная работа камеры Raspberry.
## commander check
Для проверки основных подсистем PX4 и возможности арминга в данный момент можно выполнить в MAVLink-консоли команду `commander check`.
Описание некоторых проверок:
* FCU – проверка корректности соединения с полетным контроллером;
* IMU – проверка корректности данных с IMU;
* Local position – наличие локалной позиции дрона;
* Velocity estimation – оценка скоростей дрона (**запрещено выполнять автономный взлет при ошибках в этой проверке!**);
* Global position (GPS) – наличие глобальной позиции (требуется GPS);
* Camera – корректная работа камеры Raspberry.
## commander check
Для проверки основных подсистем PX4 и возможности арминга в данный момент можно выполнить в MAVLink-консоли команду `commander check`.
 При использовании SITL вместо MAVLink-консоли необходимо использовать терминал, где запущен SITL.
При использовании SITL вместо MAVLink-консоли необходимо использовать терминал, где запущен SITL.