# Сборка Клевера 4
## Размер крепежа
> **Hint** Во время сборки используются винты и стойки различных размеров, использование крепежа не соответствующего размера может повредить коптер.
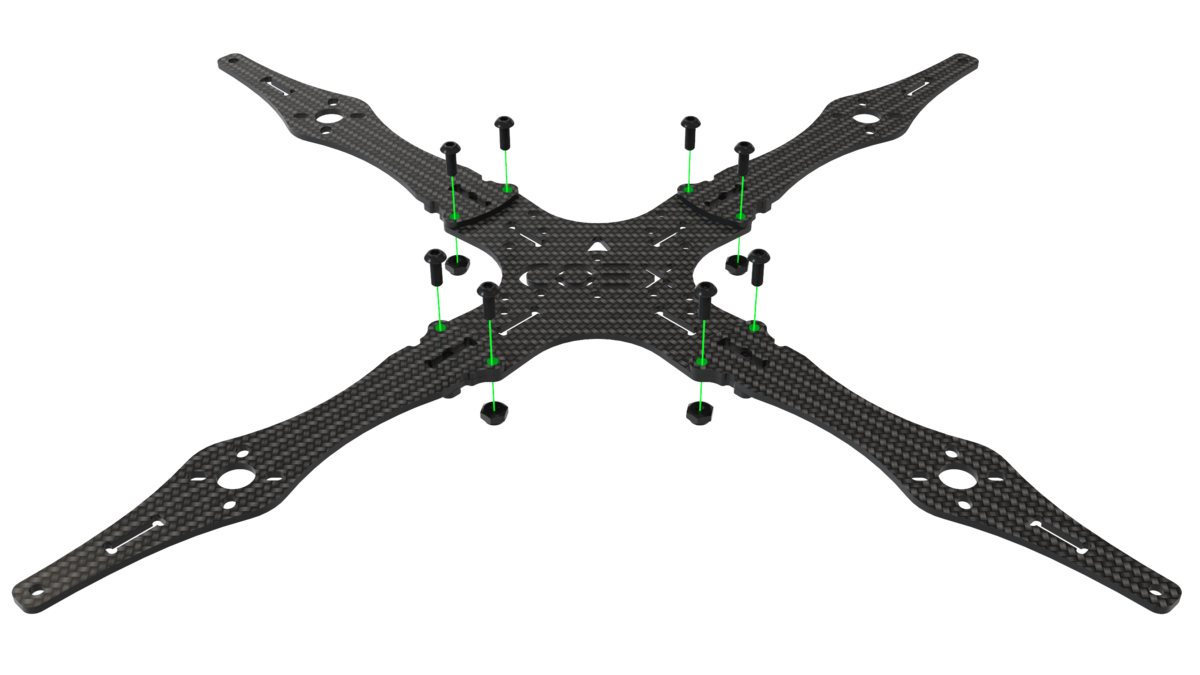
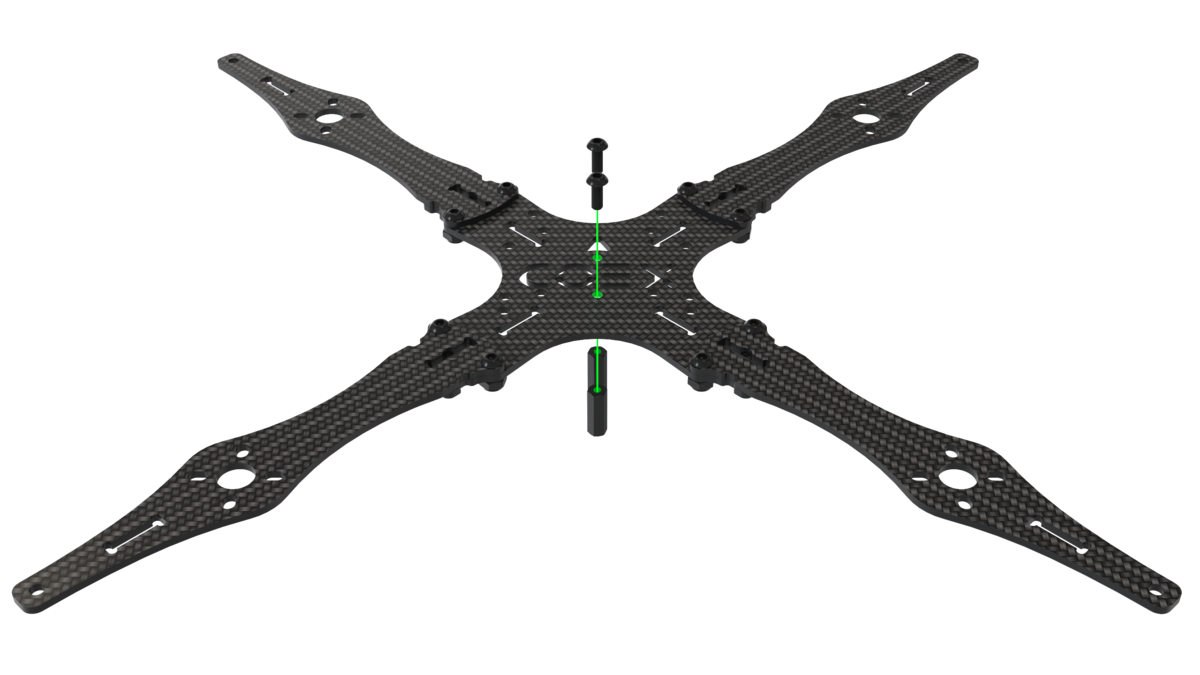
 ## Сборка рамы
1. Совместите 4 луча с центральной декой, зафиксируйте их при помощи винтов М3х8 и гаек с нейлоновой вставкой.
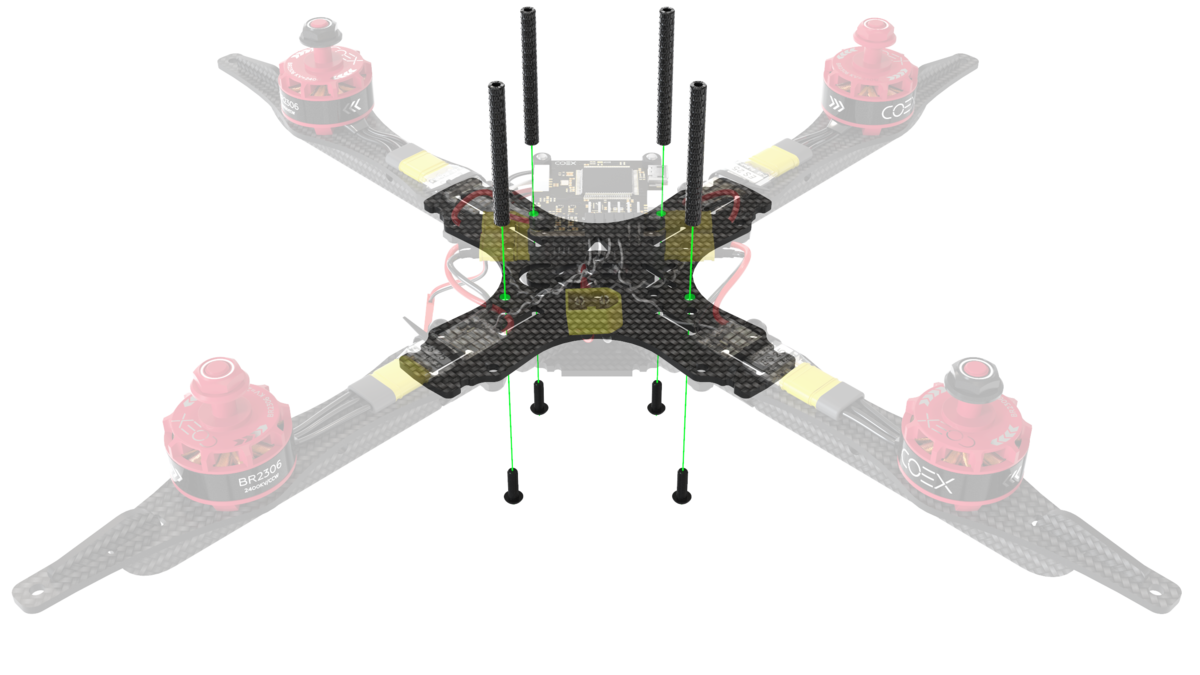
2. На центральные отверстия в главной деке установите 2 стойки 20мм и закрепите их с помощью винтов М3х8.
## Сборка рамы
1. Совместите 4 луча с центральной декой, зафиксируйте их при помощи винтов М3х8 и гаек с нейлоновой вставкой.
2. На центральные отверстия в главной деке установите 2 стойки 20мм и закрепите их с помощью винтов М3х8.
 3. Установите крючок пластины жесткости в паз на луче.
3. Установите крючок пластины жесткости в паз на луче.
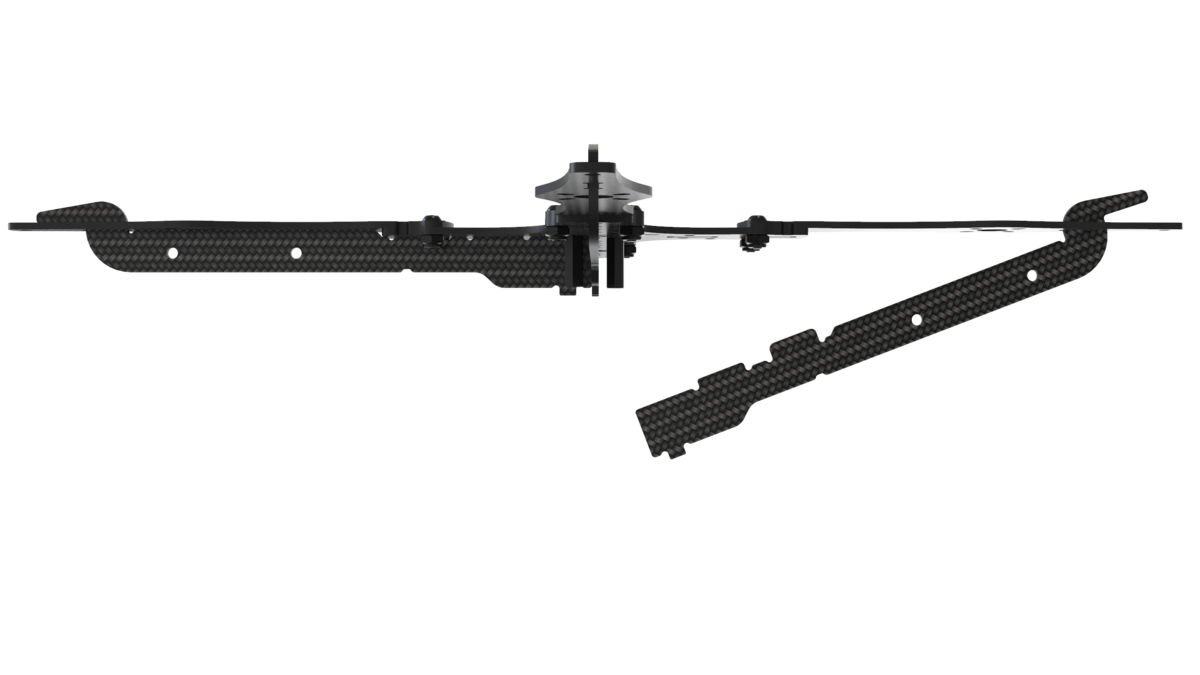 4. Прижмите пластины жесткости к главной деке.
4. Прижмите пластины жесткости к главной деке.
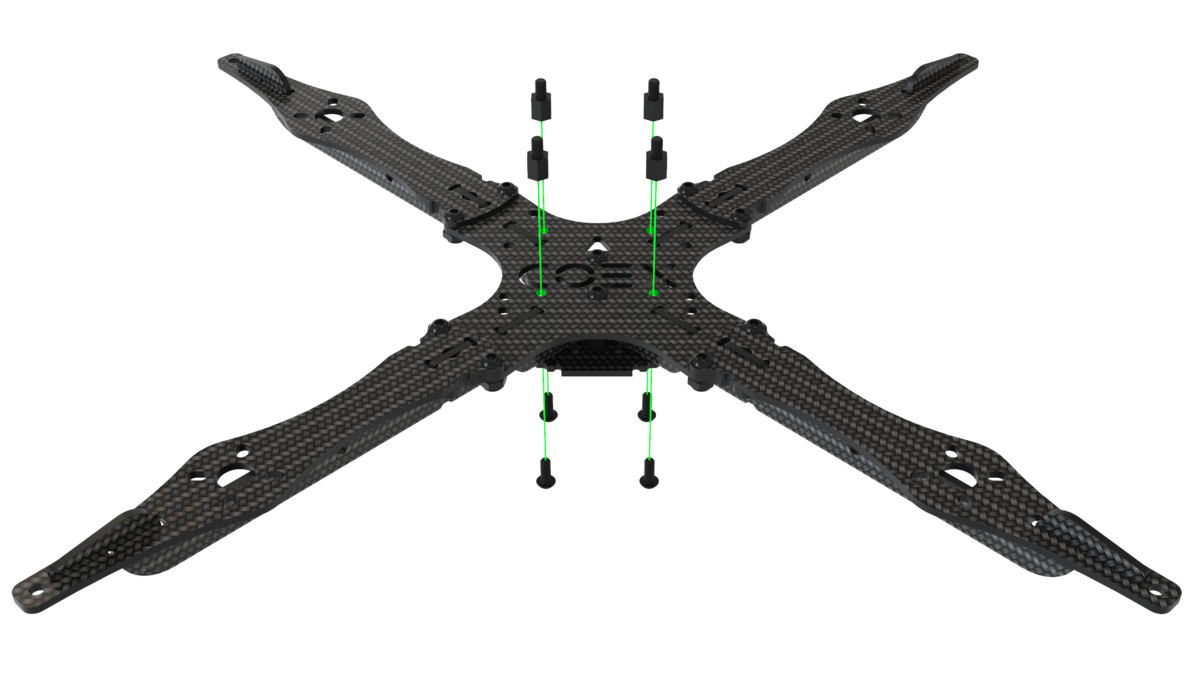
 5. Стяните пластины жесткости с помощью малой карбоновой деки.
5. Стяните пластины жесткости с помощью малой карбоновой деки.
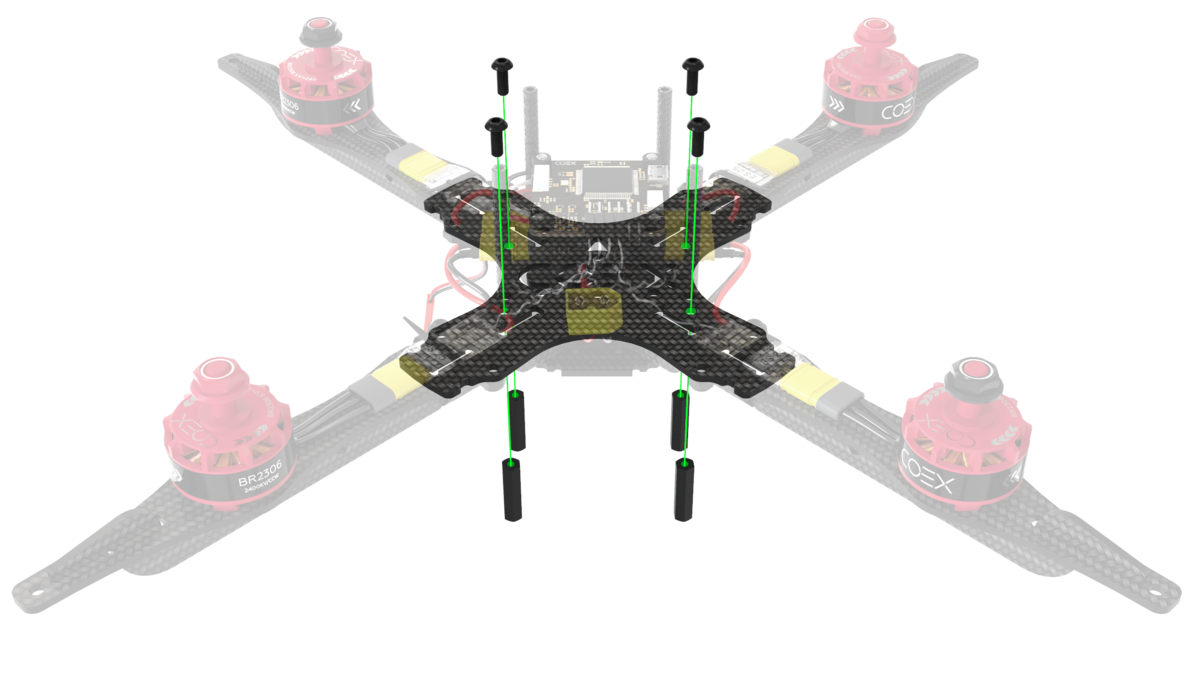
 6. Установите 4 нейлоновые стойки 6мм и закрепите их с помощью винтов М3х6.
6. Установите 4 нейлоновые стойки 6мм и закрепите их с помощью винтов М3х6.
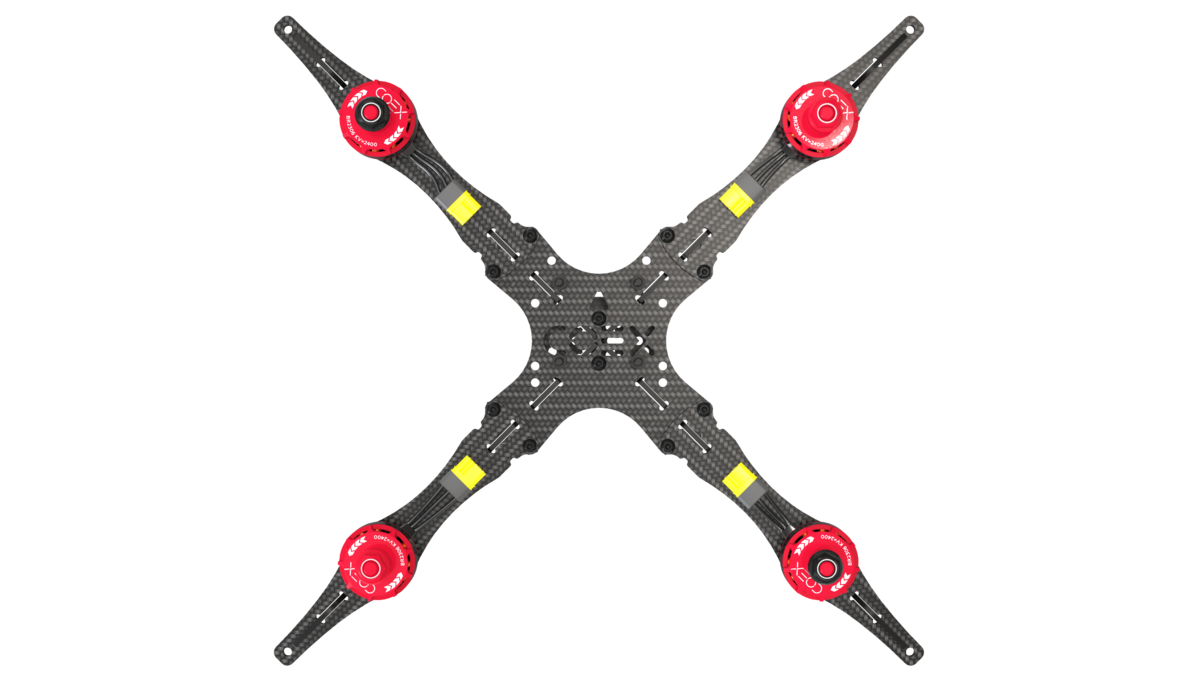
 ## Установка моторов
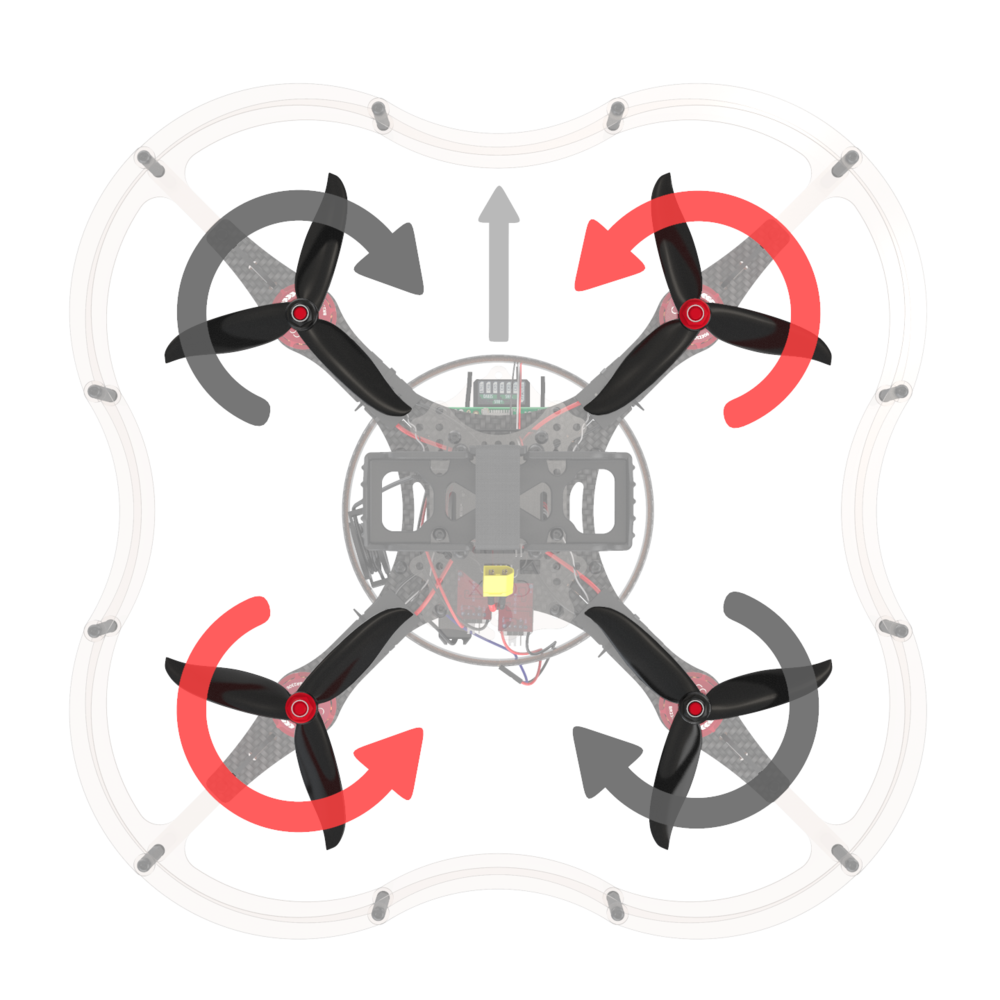
1. При установке моторов обратите внимание на схему вращения моторов. Маркировка вращения на моторах должна совпадать со схемой вращения.
## Установка моторов
1. При установке моторов обратите внимание на схему вращения моторов. Маркировка вращения на моторах должна совпадать со схемой вращения.
 2. Установите мотор на соответствующие отверстия в луче с помощью **винтов М3х5**.
> **Caution** Убедитесь, что моторы закреплены с помощью винтов М3х5, в противном случае может возникнуть короткое замыкание между обмотками.
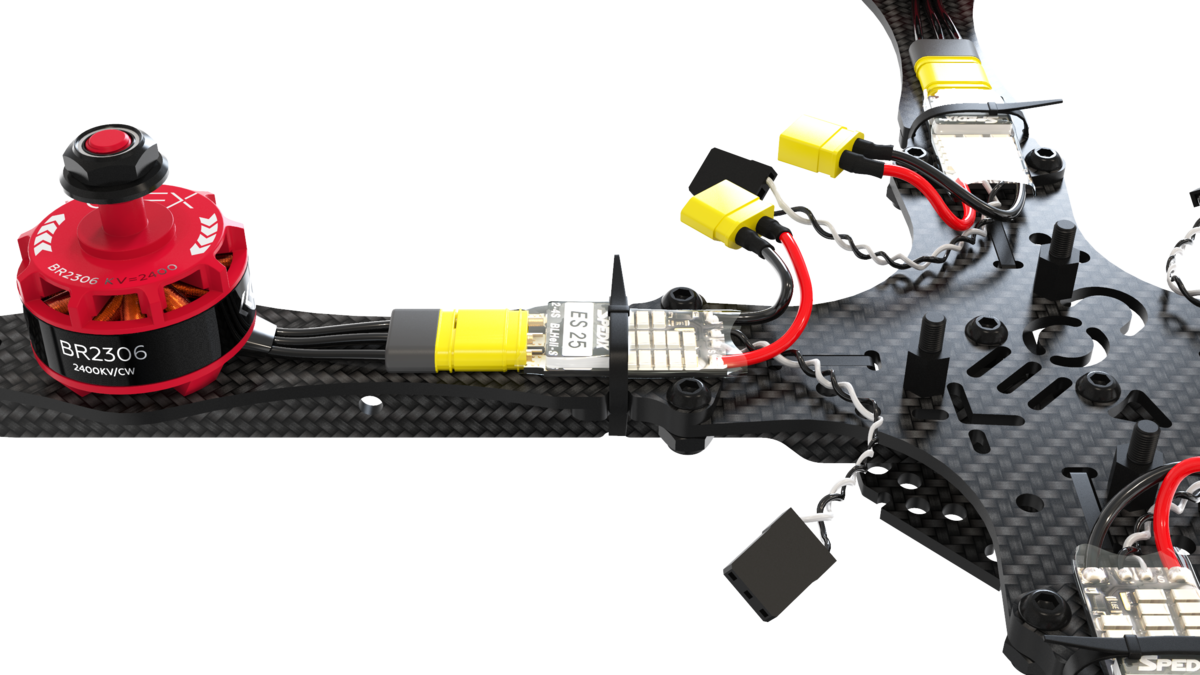
## Установка ESC и PDB
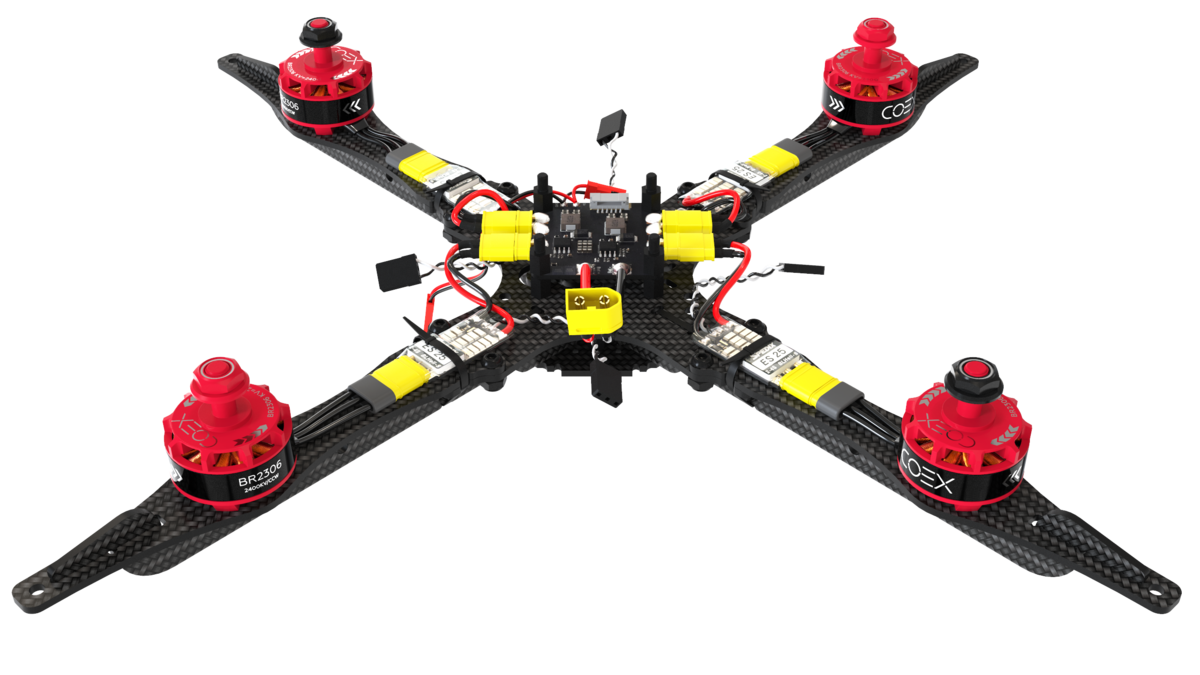
1. Подсоедините к моторам регуляторы оборотов(ESC) с помощью разъемов MR30 и закрепите их на лучах с помощью хомутов.
2. На заранее закрепленные стойки установите плату распределения питания(PDB) и зафиксируйте ее стойками 6мм. Плата распределения питания должна быть установлена таким образом, чтобы кабель подключения питания был направлен в сторону хвоста коптера.
2. Установите мотор на соответствующие отверстия в луче с помощью **винтов М3х5**.
> **Caution** Убедитесь, что моторы закреплены с помощью винтов М3х5, в противном случае может возникнуть короткое замыкание между обмотками.
## Установка ESC и PDB
1. Подсоедините к моторам регуляторы оборотов(ESC) с помощью разъемов MR30 и закрепите их на лучах с помощью хомутов.
2. На заранее закрепленные стойки установите плату распределения питания(PDB) и зафиксируйте ее стойками 6мм. Плата распределения питания должна быть установлена таким образом, чтобы кабель подключения питания был направлен в сторону хвоста коптера.
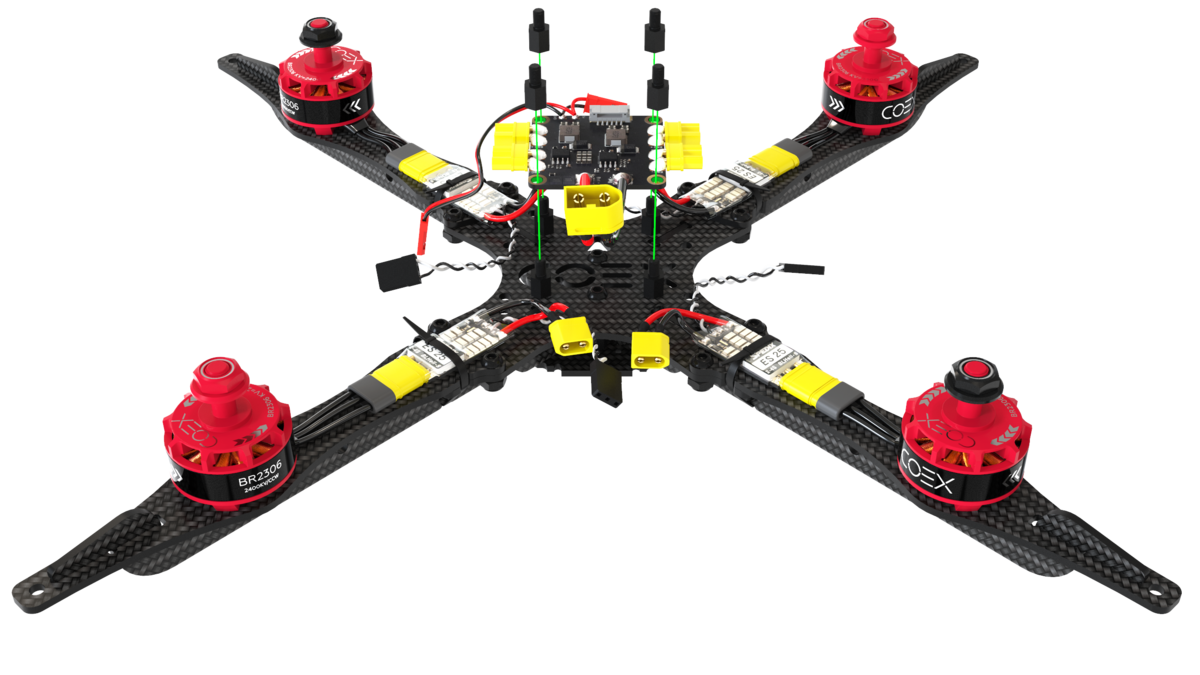 3. Подключите к плате распределения питания силовые выходы регуляторов оборотов.
3. Подключите к плате распределения питания силовые выходы регуляторов оборотов.
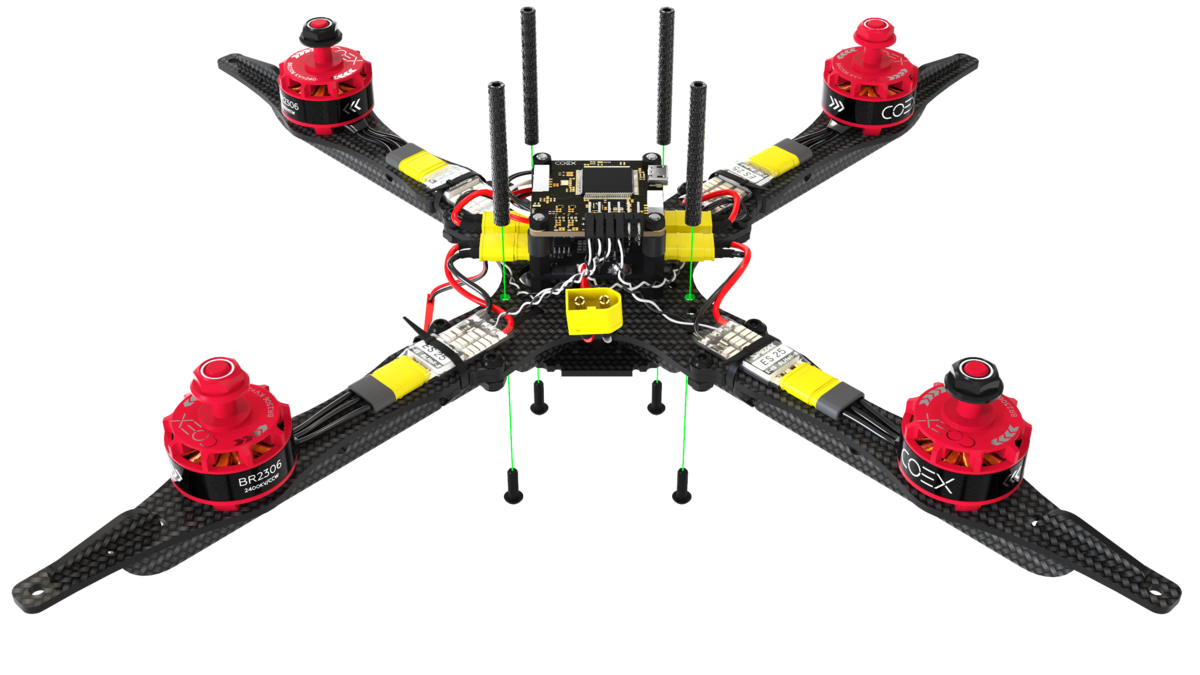
 ## Установка полетного контроллера
Набор *Клевер 4* позволяет установить различные полетные контроллеры, к примеру *COEX Pix* и *Pixracer*.
> **Caution** При установке полетного контроллера обратите внимание на стрелку, расположенную на плате, при монтаже она должна быть направлена к носу коптера.
### COEX Pix
> **Hint** Перед установкой демпферных стоек, накрутите 2 слоя нейлоновых гаек, для более прочного крепления или откусите лишнюю резьбу с помощью бокорезов.
Установите демпферные стойки 6мм, на них закрепите *COEX Pix* с помощью нейлоновых гаек.
## Установка полетного контроллера
Набор *Клевер 4* позволяет установить различные полетные контроллеры, к примеру *COEX Pix* и *Pixracer*.
> **Caution** При установке полетного контроллера обратите внимание на стрелку, расположенную на плате, при монтаже она должна быть направлена к носу коптера.
### COEX Pix
> **Hint** Перед установкой демпферных стоек, накрутите 2 слоя нейлоновых гаек, для более прочного крепления или откусите лишнюю резьбу с помощью бокорезов.
Установите демпферные стойки 6мм, на них закрепите *COEX Pix* с помощью нейлоновых гаек.
 ### Pixracer
1. Установите малую деку на стойки и зафиксируйте ее нейлоновыми гайками.
### Pixracer
1. Установите малую деку на стойки и зафиксируйте ее нейлоновыми гайками.
 2. Склейте 3-4 слоя двустороннего скотча, приклейте его в центр малой деки и установите сверху *Pixracer*.
2. Склейте 3-4 слоя двустороннего скотча, приклейте его в центр малой деки и установите сверху *Pixracer*.
 ## Подключение полетного контроллера
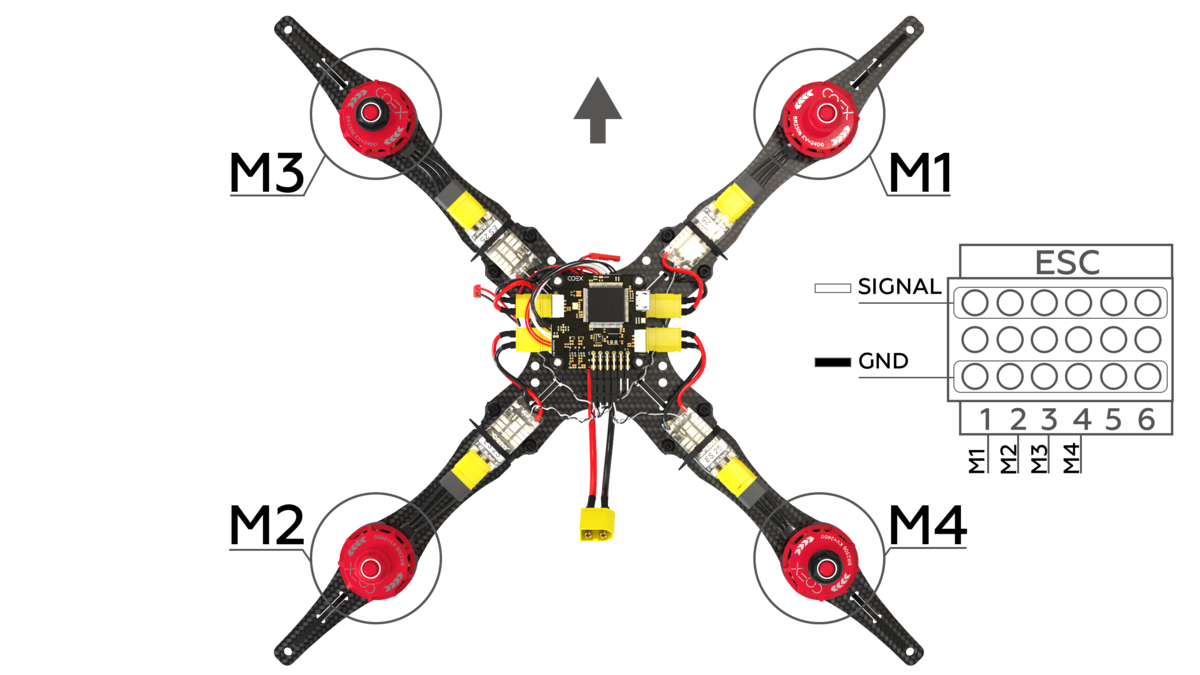
1. Подключите регуляторы оборотов к полетному контроллеру в соответствии со схемой.
## Подключение полетного контроллера
1. Подключите регуляторы оборотов к полетному контроллеру в соответствии со схемой.
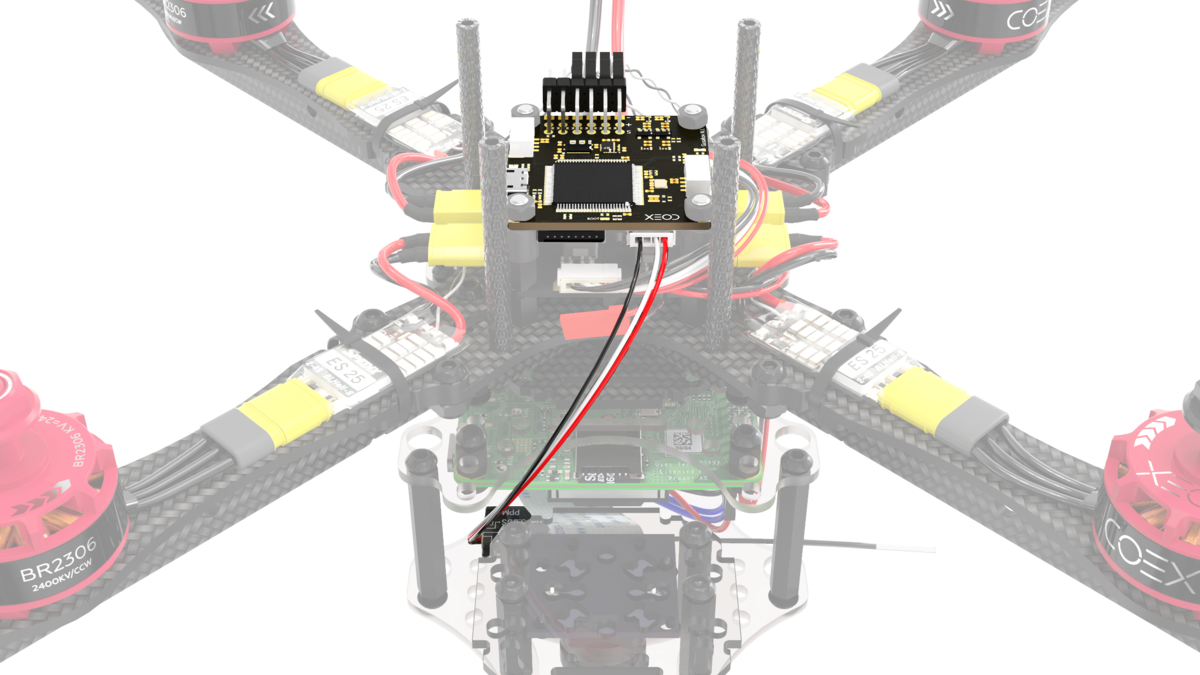
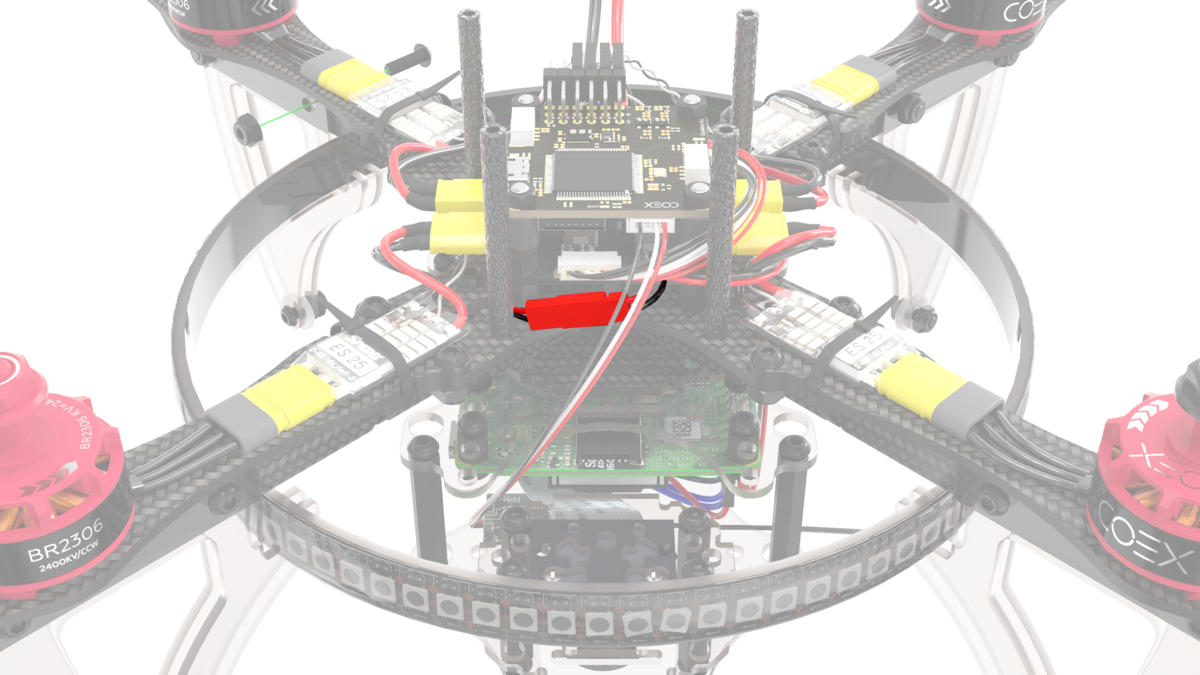
 2. Подключите кабель питания к плате распределения питания(PDB) и соответствующему разъему на полетном контроллере.
2. Подключите кабель питания к плате распределения питания(PDB) и соответствующему разъему на полетном контроллере.
 3. Установите алюминиевые стойки 40мм на винты М3х12.
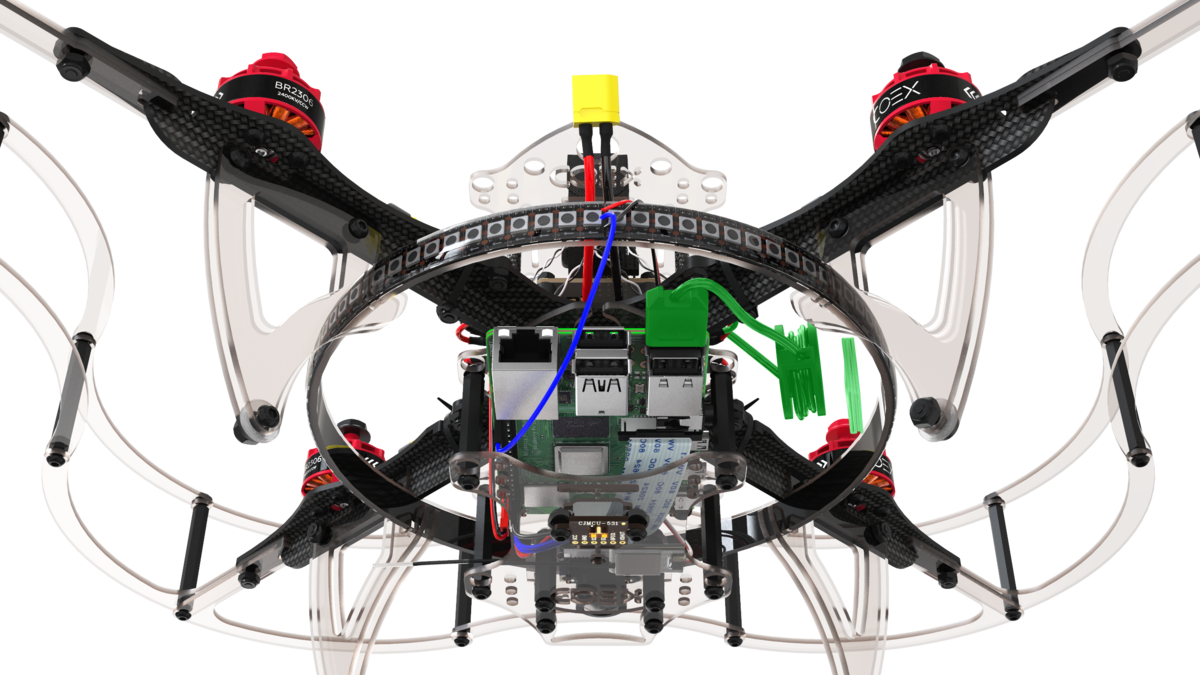
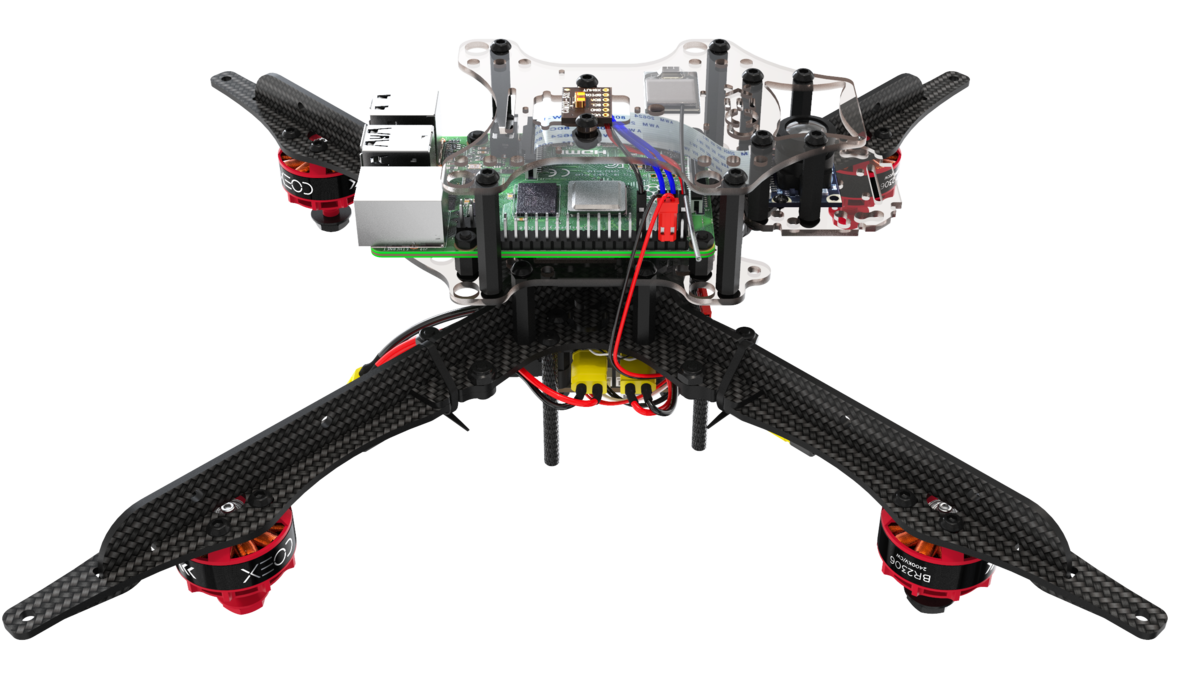
## Установка Raspberry Pi
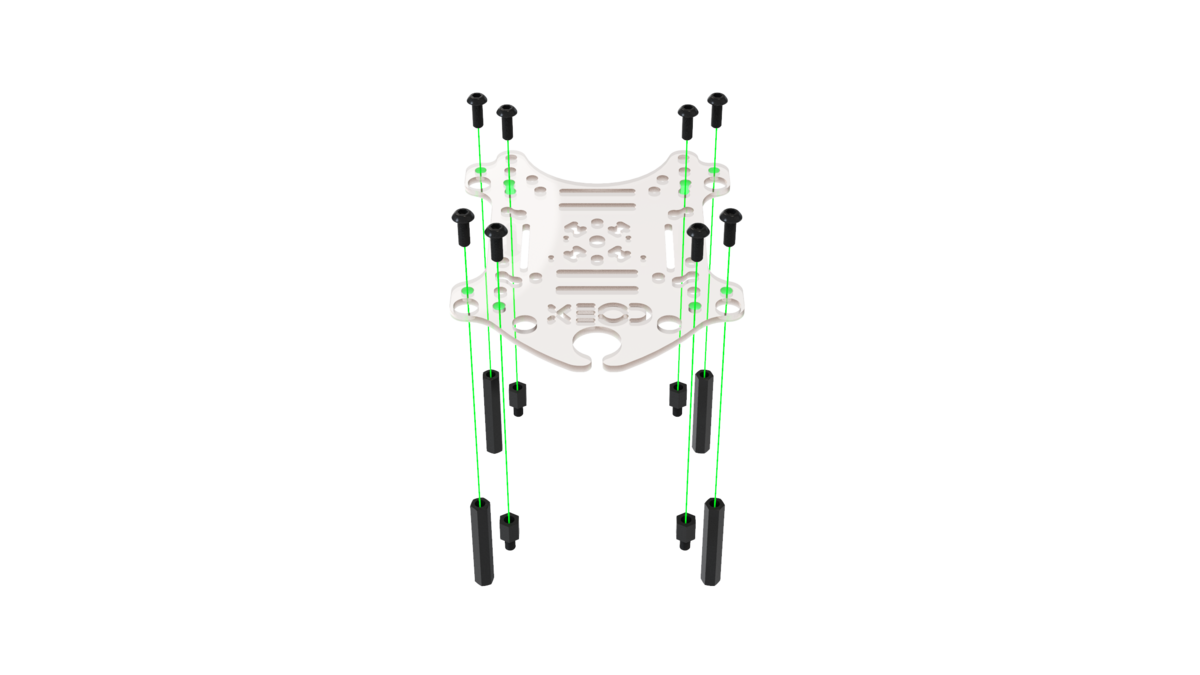
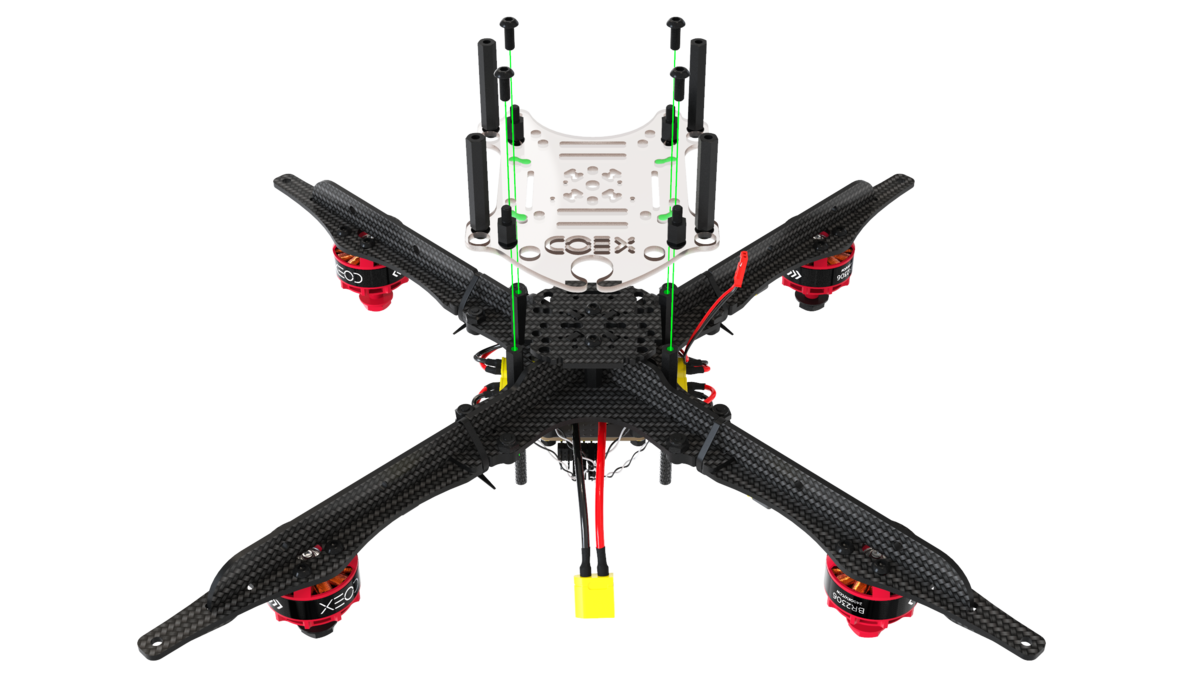
1. На основную деку установите стойки 20мм, закрепите их с помощью винтов М3х8.
2. На монтажную деку установите стойки 6мм и стойки 30мм, закрепите их с помощью винт М3х6 и М3х12 соответственно.
3. Установите алюминиевые стойки 40мм на винты М3х12.
## Установка Raspberry Pi
1. На основную деку установите стойки 20мм, закрепите их с помощью винтов М3х8.
2. На монтажную деку установите стойки 6мм и стойки 30мм, закрепите их с помощью винт М3х6 и М3х12 соответственно.
 3. Установите собранную монтажную деку на основную и закрепите с помощью винтов М3х8.
3. Установите собранную монтажную деку на основную и закрепите с помощью винтов М3х8.
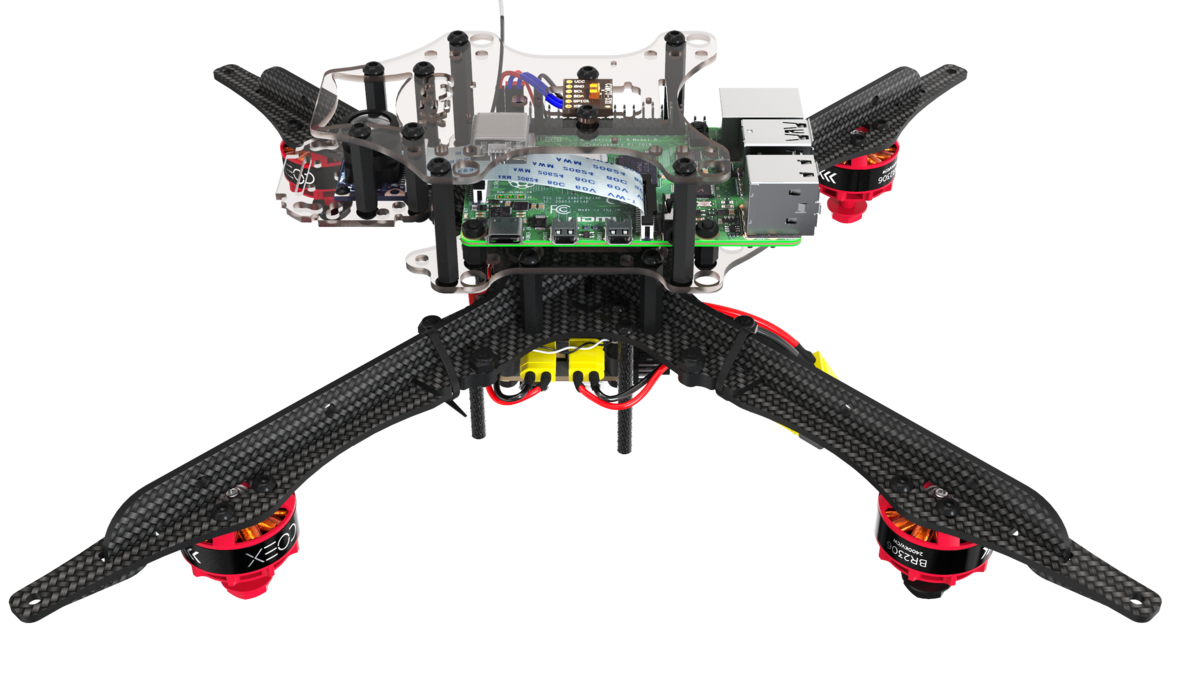
 4. Установите плату *Raspberry Pi* и зафиксируйте с помощью нейлоновых гаек.
4. Установите плату *Raspberry Pi* и зафиксируйте с помощью нейлоновых гаек.
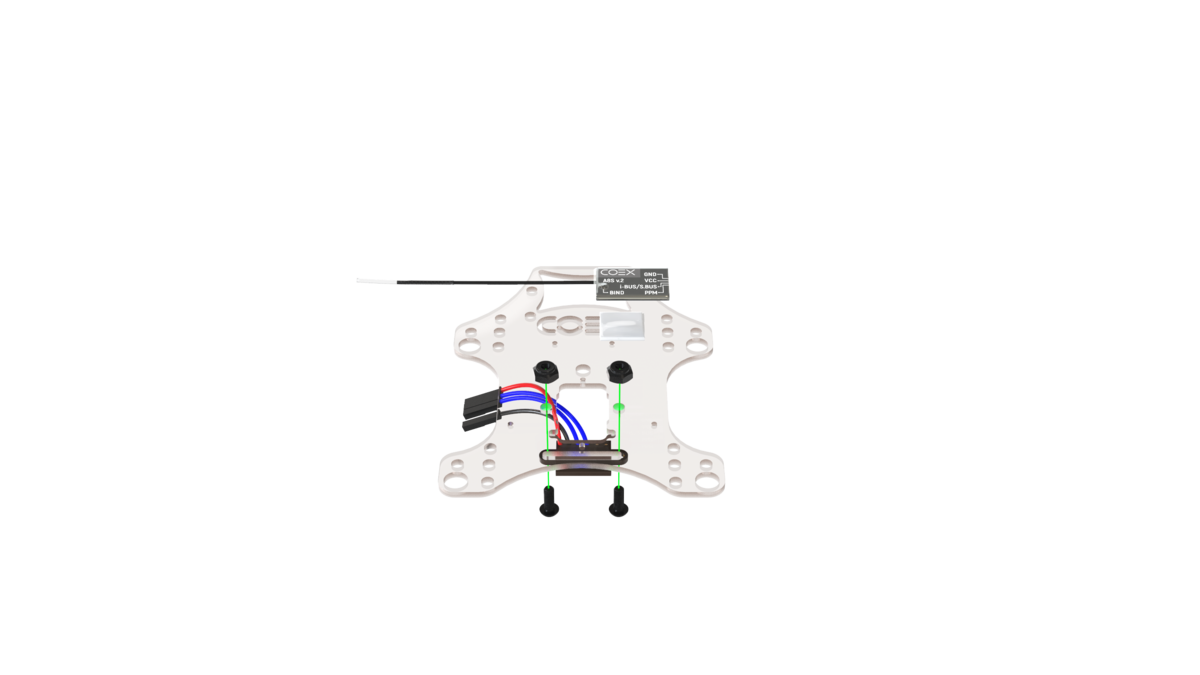
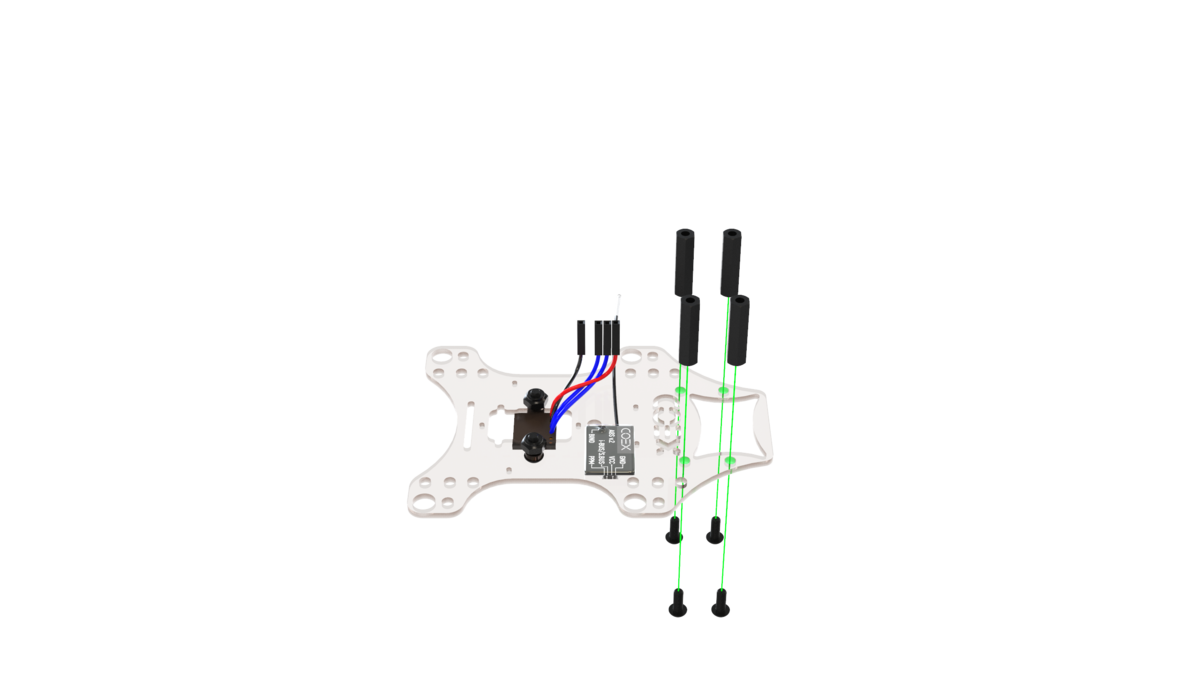
 5. На деку захвата установите дальномер с помощью самоконтрящихся гаек и винтов М3х8, и приклейте радиоприемник с помощью двустороннего скотча.
5. На деку захвата установите дальномер с помощью самоконтрящихся гаек и винтов М3х8, и приклейте радиоприемник с помощью двустороннего скотча.
 6. Установите 4 стойки 20мм и закрепите их с помощью винтов М3х8.
6. Установите 4 стойки 20мм и закрепите их с помощью винтов М3х8.
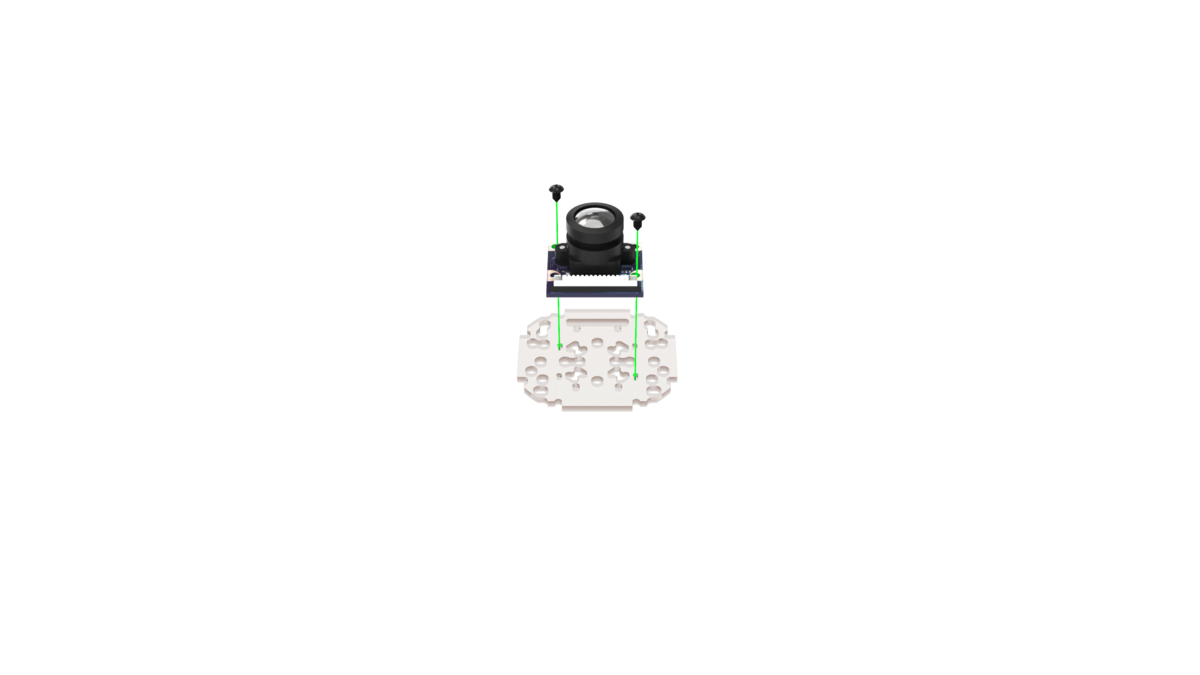
 7. На малую монтажную деку установите камеру и зафиксируйте ее с помощью 2ух саморезов М2х5, в верхнем левом и нижнем правом углах.
7. На малую монтажную деку установите камеру и зафиксируйте ее с помощью 2ух саморезов М2х5, в верхнем левом и нижнем правом углах.
 8. Установите модуль камеры на деку захвата и закрепите с помощью винтов М3х8.
8. Установите модуль камеры на деку захвата и закрепите с помощью винтов М3х8.
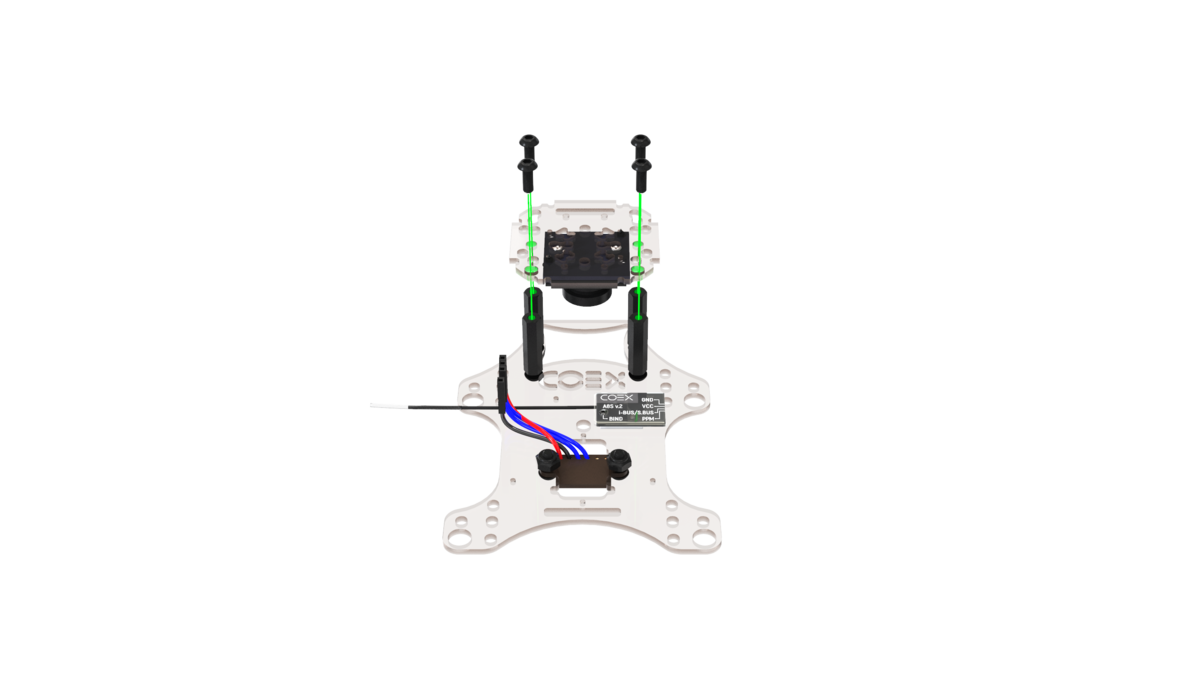 9. Установите собранную деку захвата и зафиксируйте с помощью винтов М3х8.
9. Установите собранную деку захвата и зафиксируйте с помощью винтов М3х8.
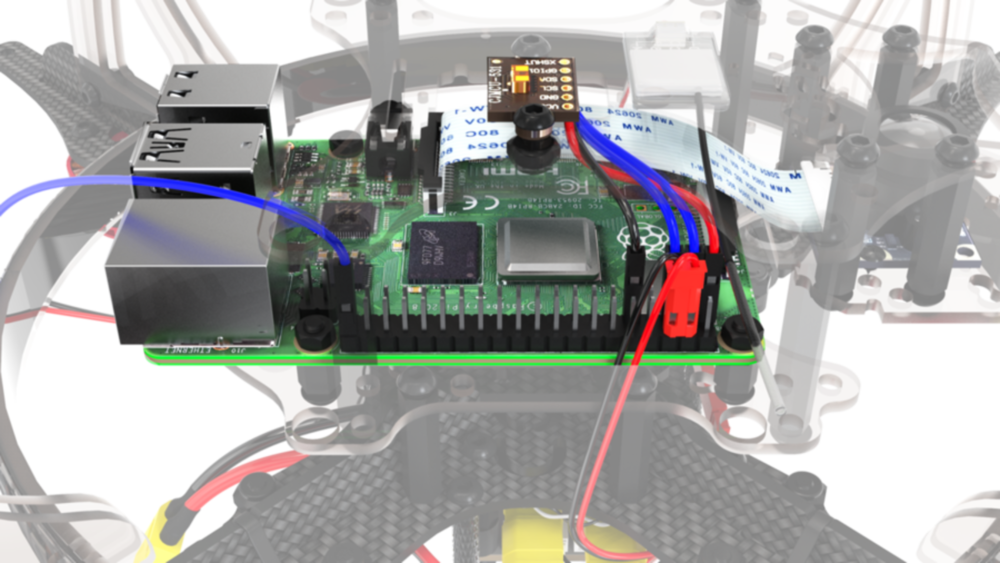
 10. Подключите к *Raspberri Pi* дальномер и кабель питания.
10. Подключите к *Raspberri Pi* дальномер и кабель питания.
 11. Подключите радиоприемник к полетному контроллеру используя разъем *RCIN*.
11. Подключите радиоприемник к полетному контроллеру используя разъем *RCIN*.
 12. Подключите шлейф камеры к *Raspberry Pi*.
12. Подключите шлейф камеры к *Raspberry Pi*.
 ## Установка LED ленты
1. Соберите обруч для светодиодной ленты, объединив замок на концах.
## Установка LED ленты
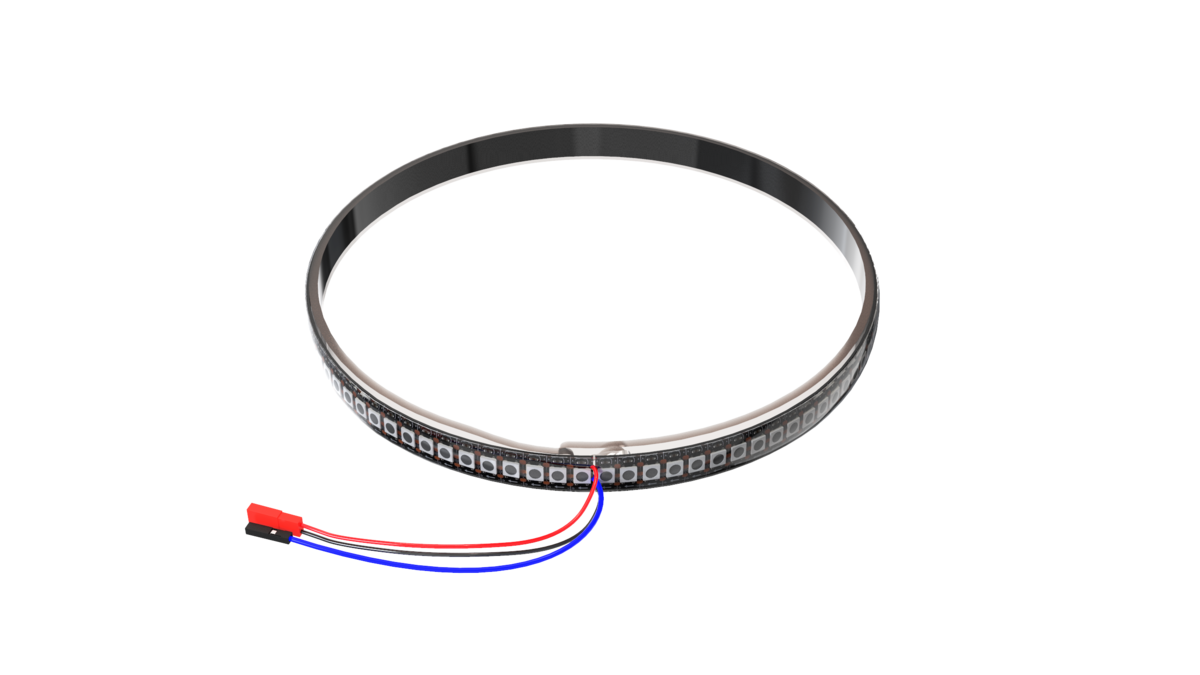
1. Соберите обруч для светодиодной ленты, объединив замок на концах.
 2. Наклейте светодиодную ленту на обруч, для большей крепкости притяните ее с помощью 3-4 хомутов.
2. Наклейте светодиодную ленту на обруч, для большей крепкости притяните ее с помощью 3-4 хомутов.
 3. Установите ножки на пластину жесткости с помощью самоконтрящихся гаек и винтов М3х8 используя только крайние монтажные отверстия. Снизу, между пластинами ножек установите демпферное силиконовое колечко.
3. Установите ножки на пластину жесткости с помощью самоконтрящихся гаек и винтов М3х8 используя только крайние монтажные отверстия. Снизу, между пластинами ножек установите демпферное силиконовое колечко.
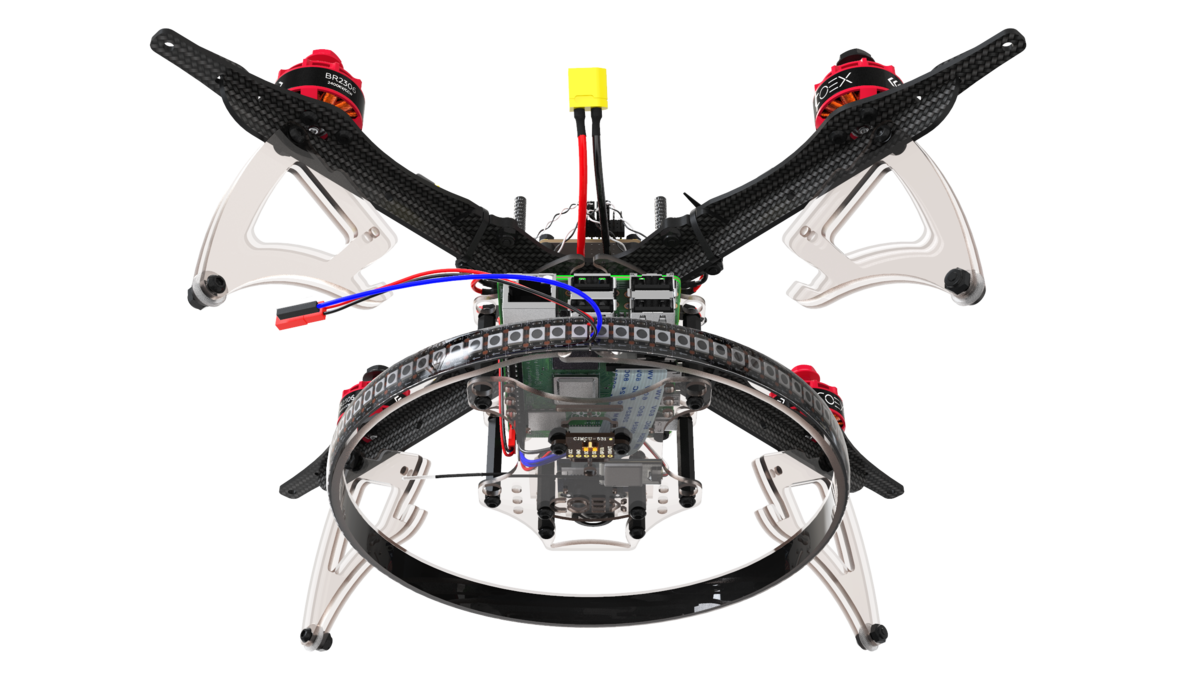
 4. Отогните ножки назад и в специальный паз на них установите обруч со светодиодной лентой, таким образом, чтобы кабели подключения выходили с хвостовой стороны коптера.
4. Отогните ножки назад и в специальный паз на них установите обруч со светодиодной лентой, таким образом, чтобы кабели подключения выходили с хвостовой стороны коптера.
 5. Закрепите ножки с помощью самоконтрящихся гаек и винтов М3х8.
5. Закрепите ножки с помощью самоконтрящихся гаек и винтов М3х8.
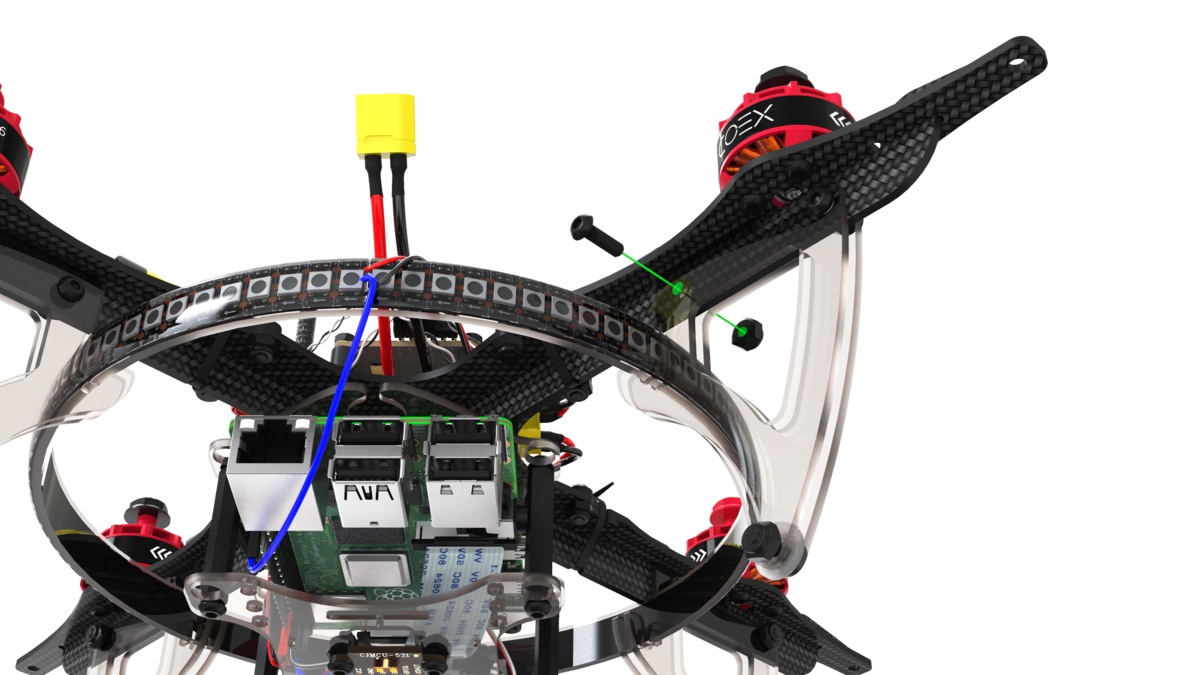 6. Подключите питание светодиодной ленты(красный, черный кабели) в короткий разъем JST на плате распределения питания.
6. Подключите питание светодиодной ленты(красный, черный кабели) в короткий разъем JST на плате распределения питания.
 7. Подключите сигнальный выход светодиодной ленты(белый кабель) в *Raspberry Ri*, к пину *GPIO 21*.
7. Подключите сигнальный выход светодиодной ленты(белый кабель) в *Raspberry Ri*, к пину *GPIO 21*.
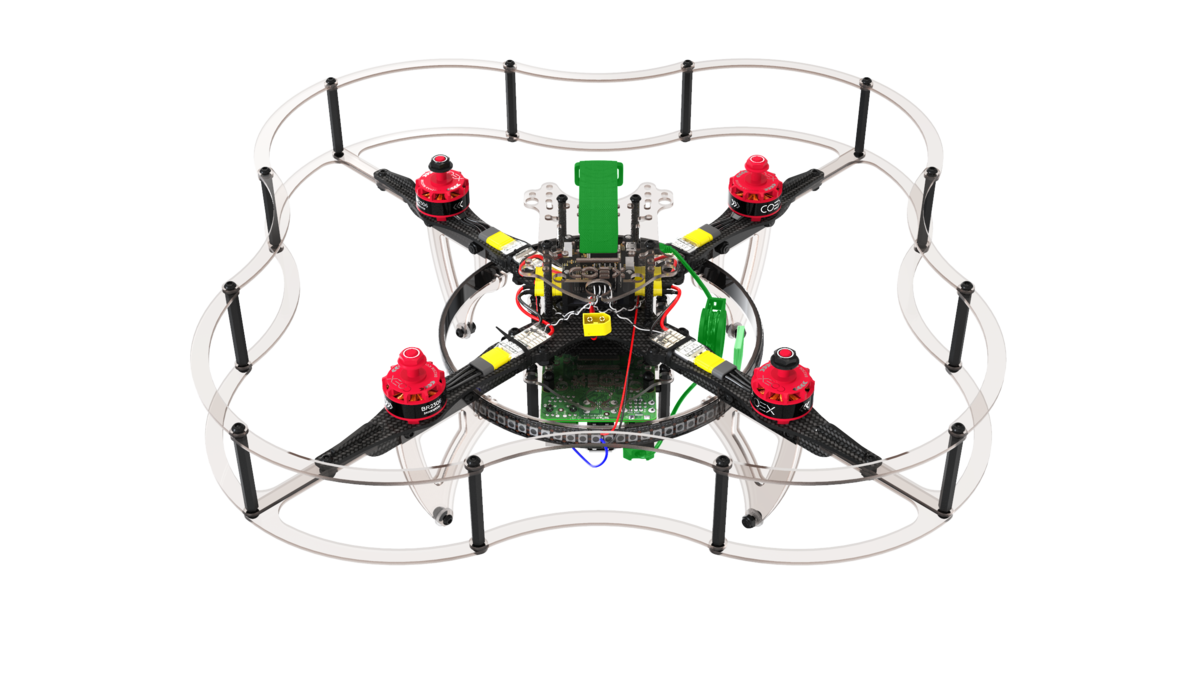
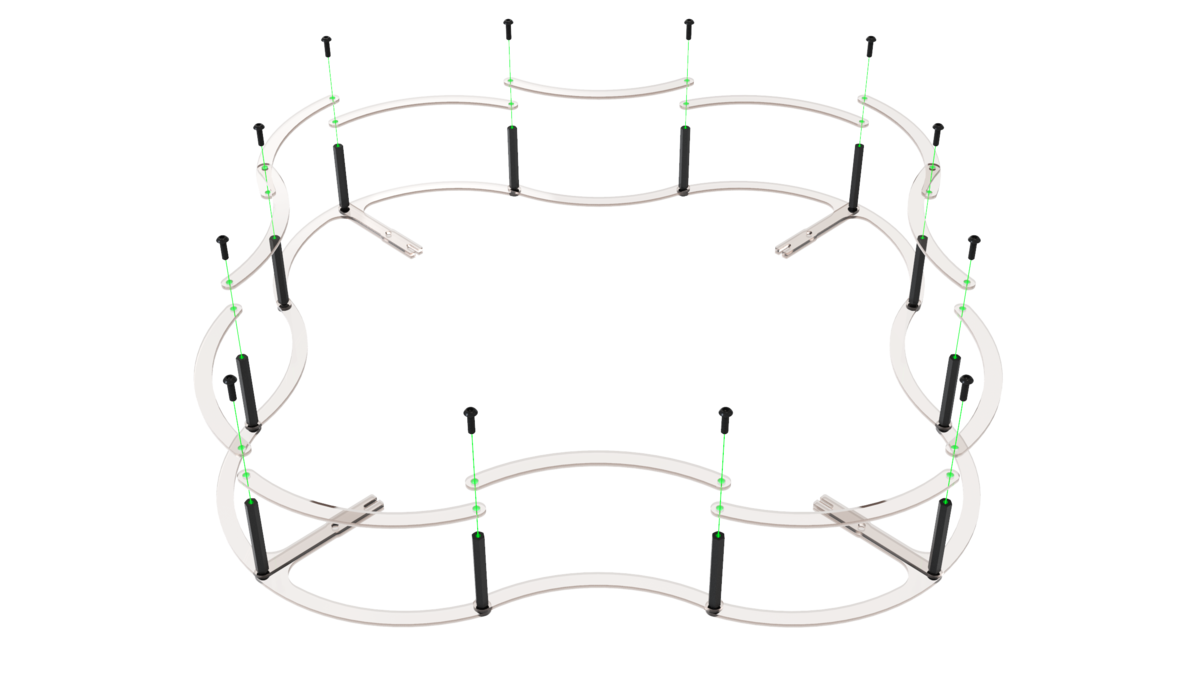
 ## Установка защиты
1. Соберите нижний уровень защиты с помощью стоек 40мм и винтов М3х12.
## Установка защиты
1. Соберите нижний уровень защиты с помощью стоек 40мм и винтов М3х12.
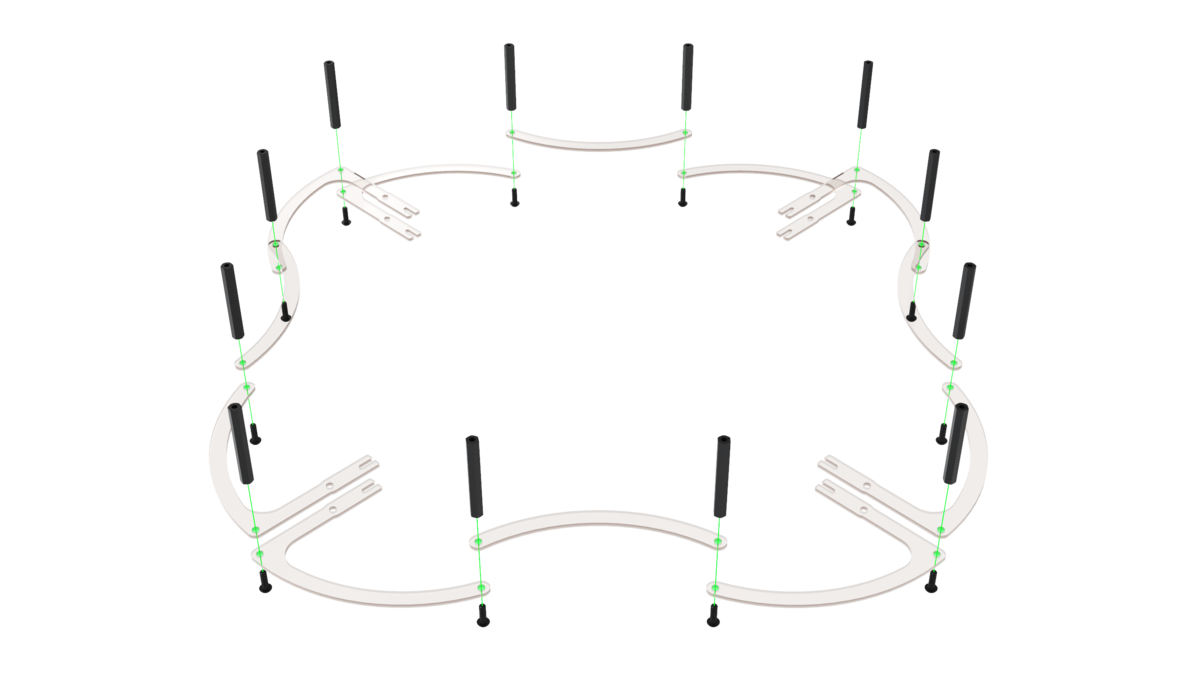 2. Соберите верхний уровень защиты с помощью винтов М3х12.
2. Соберите верхний уровень защиты с помощью винтов М3х12.
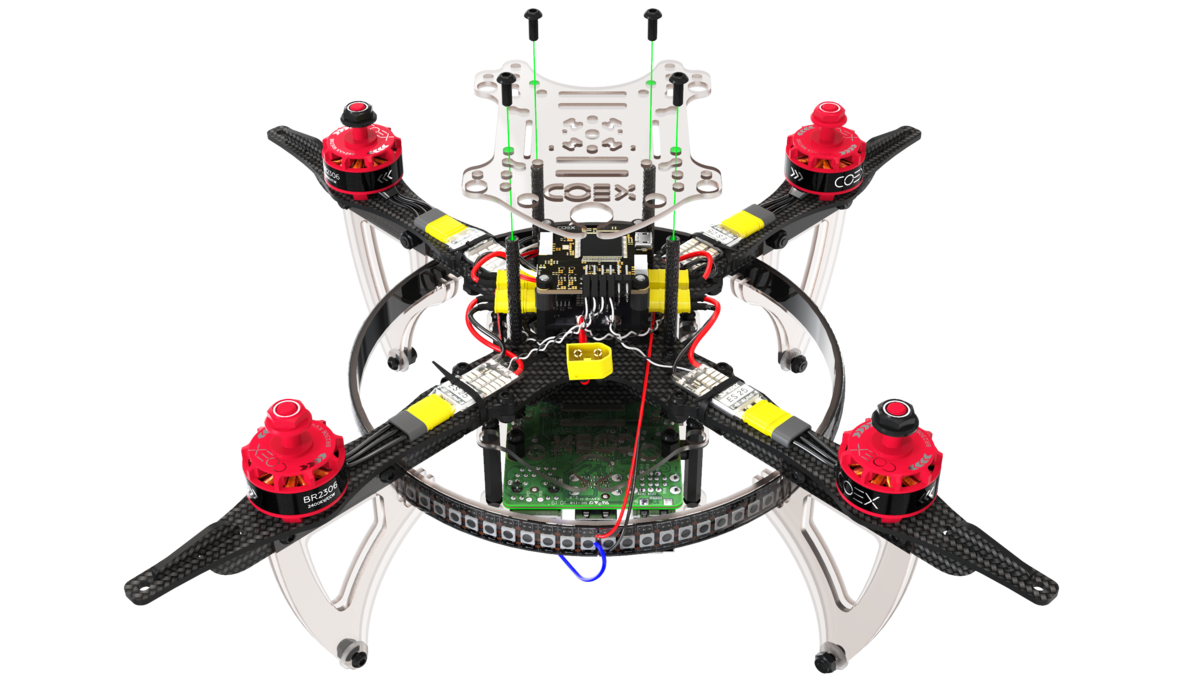
 3. Установите монтажную деку и закрепите ее винтами М3х8.
3. Установите монтажную деку и закрепите ее винтами М3х8.
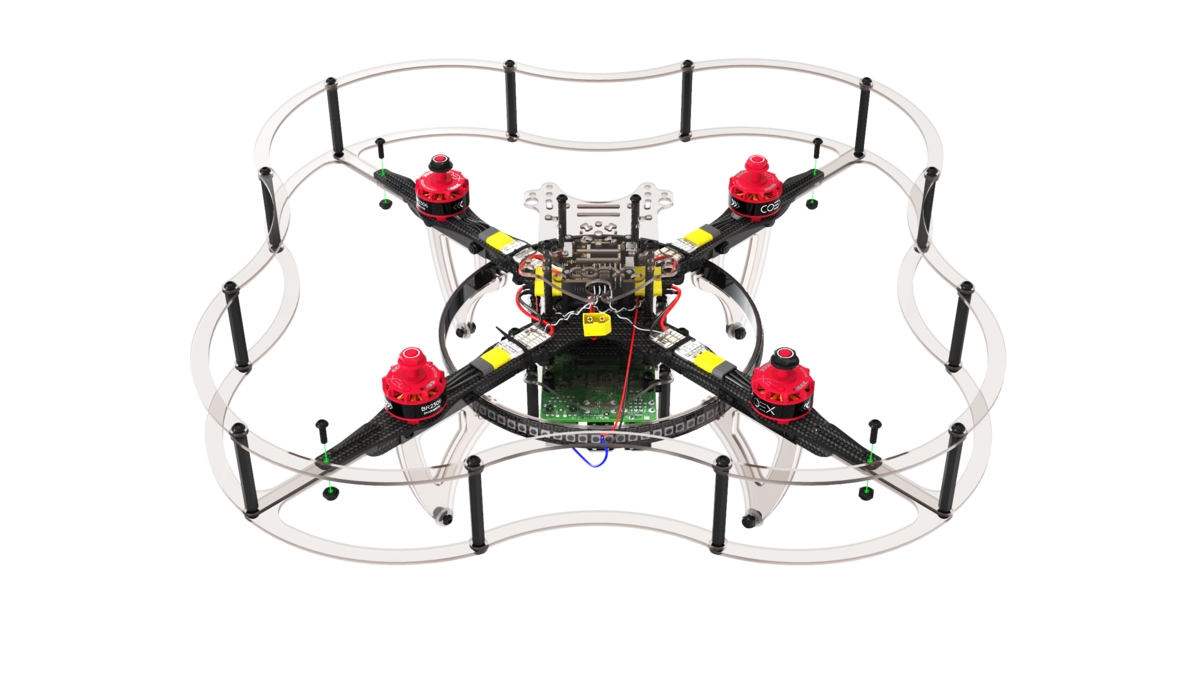
 4. Установите защиту и закрепите на лучах с помощью самоконтрящихся гаек и винтов М3х8.
4. Установите защиту и закрепите на лучах с помощью самоконтрящихся гаек и винтов М3х8.
 ## Подготовка к полету
1. Установите ремешок для аккумулятора и подключите полетный контроллер к *Raspberry Pi* с помощью USB кабеля.
2. Установите пропеллеры в соответствии со [схемой направления движения моторов](#prop_rotation).
## Подготовка к полету
1. Установите ремешок для аккумулятора и подключите полетный контроллер к *Raspberry Pi* с помощью USB кабеля.
2. Установите пропеллеры в соответствии со [схемой направления движения моторов](#prop_rotation).
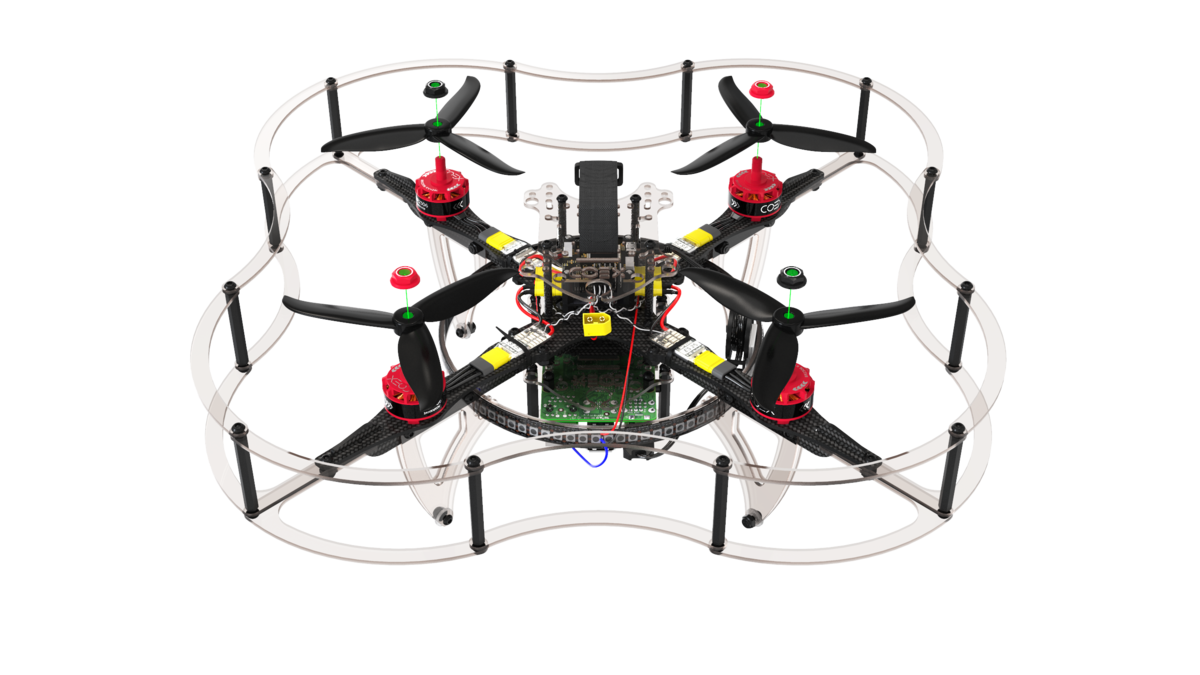 3. Установите аккумулятор.
3. Установите аккумулятор.
 > **Success** Дрон собран, далее произведите ["настройку"](setup.md).
> **Success** Дрон собран, далее произведите ["настройку"](setup.md).