# Automatic check
It is generally a good idea to perform some checks before flight, especially before an autonomous one. There are several methods of automated self-checks of the drone subsystems.
## selfcheck.py
The `selfcheck.py` utility script is part of the `clever` package; it performs automated tests of the main aspects of the ROS platform and PX4. The utility is pre-installed on [the Raspberry Pi image](microsd_images.md).
In order to run it, enter the following command in [the Raspberry Pi console](ssh.md):
```(bash)
rosrun clever selfcheck.py
```
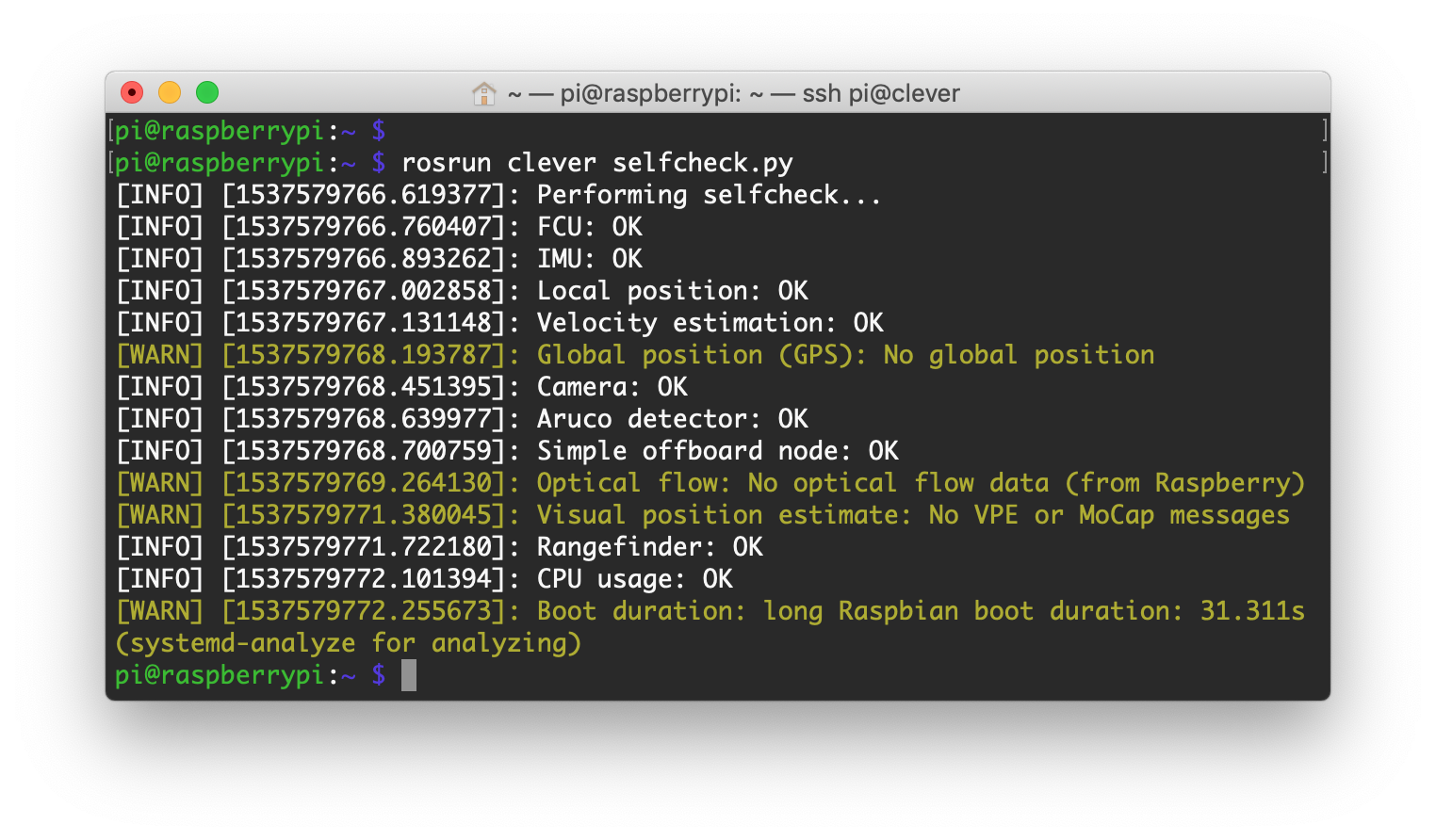 Description of some checks:
* FCU – checks for proper connection with the flight controller;
* IMU – checks whether the data from from IMU is sane;
* Local position – checks presence of local position data;
* Velocity estimation – checks whether drone velocity estimation is sane(**autonomous flight is not to be performed if this check fails!**);
* Global position (GPS) — checks for presence of global position data (GPS module is required for this check);
* Camera — checks for proper operation of the Raspberry camera.
* ArUco — checks whether [ArUco](aruco.md) detection is working
* VPE — checks whether VPE data is published
* Rangefinder — checks whether [rangefinder](laser.md) data is published
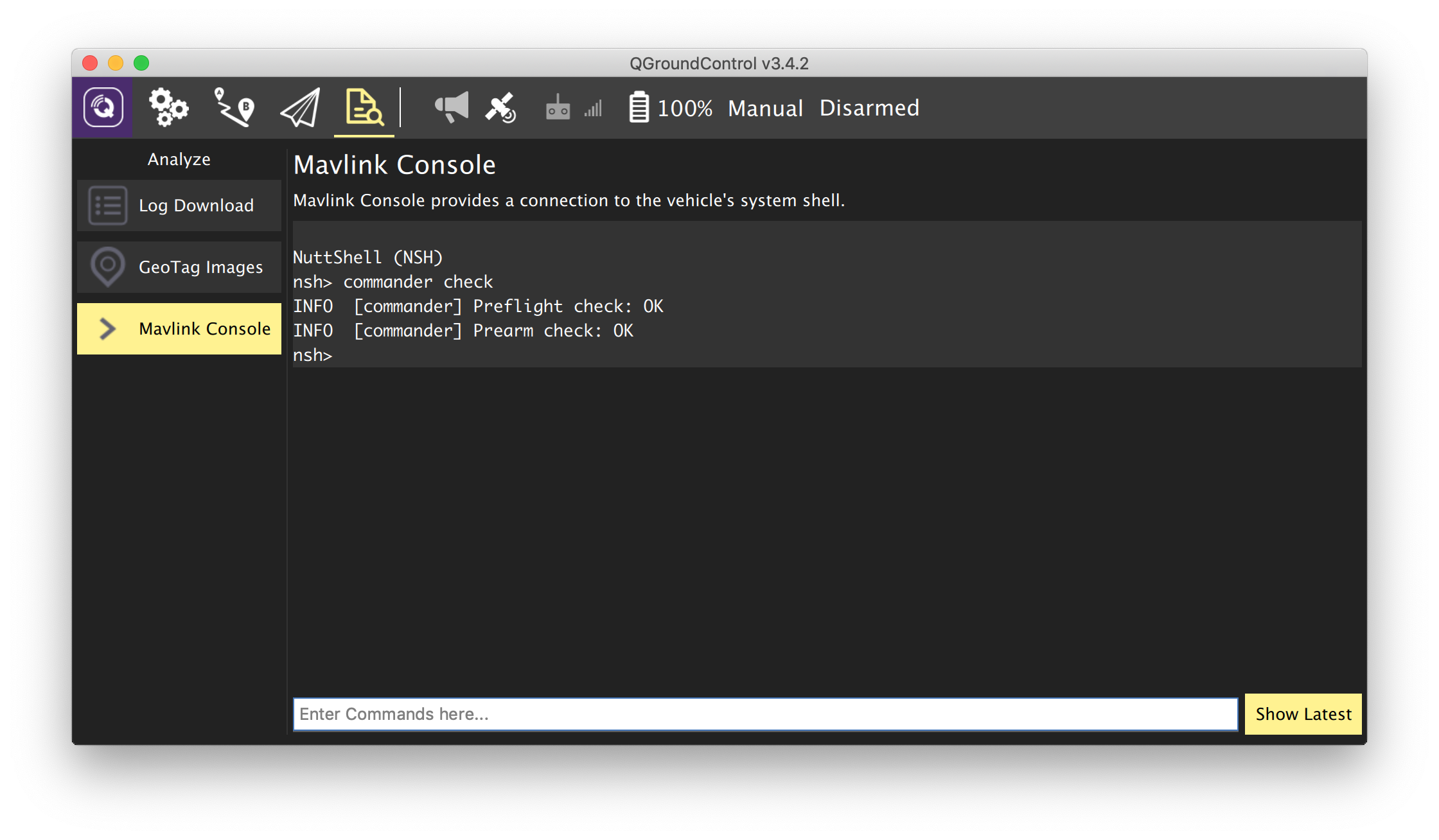
## commander check
In order check the main subsystems of PX4 and the possibility of arming at the moment you can run the `commander check` command in the MAVLink console.
Description of some checks:
* FCU – checks for proper connection with the flight controller;
* IMU – checks whether the data from from IMU is sane;
* Local position – checks presence of local position data;
* Velocity estimation – checks whether drone velocity estimation is sane(**autonomous flight is not to be performed if this check fails!**);
* Global position (GPS) — checks for presence of global position data (GPS module is required for this check);
* Camera — checks for proper operation of the Raspberry camera.
* ArUco — checks whether [ArUco](aruco.md) detection is working
* VPE — checks whether VPE data is published
* Rangefinder — checks whether [rangefinder](laser.md) data is published
## commander check
In order check the main subsystems of PX4 and the possibility of arming at the moment you can run the `commander check` command in the MAVLink console.
 If you're running SITL, you should use the terminal where PX4 simulation is running instead of the MAVLink console.
If you're running SITL, you should use the terminal where PX4 simulation is running instead of the MAVLink console.